Navigation Messages¶
Estimated State¶
This message presents the estimated state of the vehicle.
EstimatedState is a complete description of the system in terms of parameters such as position, orientation and velocities at a particular moment in time.
The system position is given by a North-East-Down (NED) local tangent plane displacement (x, y, z) relative to an absolute WGS-84 coordinate (latitude, longitude, height above ellipsoid).
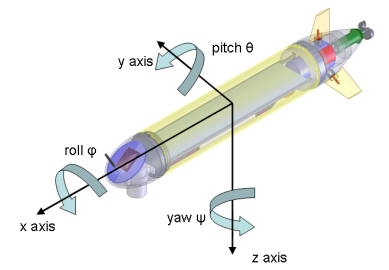
The symbols for position and attitude as well as linear and angular velocities were chosen according to SNAME’s notation (1950). The body-fixed reference frame and Euler angles are depicted next:
| align: | center |
|---|
Euler angles
- Abbreviation: EstimatedState
- Identification Number: 350
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Latitude (WGS-84) | lat | rad | fp64_t | WGS-84 Latitude. | Same as field type |
| Longitude (WGS-84) | lon | rad | fp64_t | WGS-84 Longitude. | Same as field type |
| Height (WGS-84) | height | m | fp32_t | Height above the WGS-84 ellipsoid. | Same as field type |
| Offset north | x | m | fp32_t | The North offset of the North/East/Down field with respect to LLH. | Same as field type |
| Offset east | y | m | fp32_t | The East offset of the North/East/Down field with respect to LLH. | Same as field type |
| Offset down | z | m | fp32_t | The Down offset of the North/East/Down field with respect to LLH. | Same as field type |
| Rotation over x axis | phi | rad | fp32_t | The phi Euler angle from the vehicle’s attitude. | Same as field type |
| Rotation over y axis | theta | rad | fp32_t | The theta Euler angle from the vehicle’s attitude. | Same as field type |
| Rotation over z axis | psi | rad | fp32_t | The psi Euler angle from the vehicle’s attitude. | Same as field type |
| Body-Fixed xx Velocity | u | m/s | fp32_t | Body-fixed frame xx axis velocity component. | Same as field type |
| Body-Fixed yy Velocity | v | m/s | fp32_t | Body-fixed frame yy axis velocity component. | Same as field type |
| Body-Fixed zz Velocity | w | m/s | fp32_t | Body-fixed frame zz axis velocity component. | Same as field type |
| Ground Velocity X (North) | vx | m/s | fp32_t | Ground Velocity xx axis velocity component. | Same as field type |
| Ground Velocity Y (East) | vy | m/s | fp32_t | Ground Velocity yy axis velocity component. | Same as field type |
| Ground Velocity Z (Down) | vz | m/s | fp32_t | Ground Velocity zz axis velocity component. | Same as field type |
| Angular Velocity in x | p | rad/s | fp32_t | The angular velocity over body-fixed xx axis (roll). | Same as field type |
| Angular Velocity in y | q | rad/s | fp32_t | The angular velocity over body-fixed yy axis (pitch). | Same as field type |
| Angular Velocity in z | r | rad/s | fp32_t | The angular velocity over body-fixed zz axis (yaw). | Same as field type |
| Depth | depth | m | fp32_t | Depth, in meters. To be used by underwater vehicles. Negative values denote invalid estimates. | Same as field type |
| Altitude | alt | m | fp32_t | Altitude, in meters. Negative values denote invalid estimates. | Same as field type |
Estimated Stream Velocity¶
The estimated stream velocity, typically for water or air streams.
- Abbreviation: EstimatedStreamVelocity
- Identification Number: 351
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| X component (North) | x | m/s | fp64_t | X component (North). | Same as field type |
| Y component (East) | y | m/s | fp64_t | Y component (East). | Same as field type |
| Z component (Down) | z | m/s | fp64_t | Z component (Down). | Same as field type |
Indicated Speed¶
Speed measured by the navigation filter.
- Abbreviation: IndicatedSpeed
- Identification Number: 352
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Measured speed | value | m/s | fp64_t | Same as field type |
True Speed¶
Ground true speed.
- Abbreviation: TrueSpeed
- Identification Number: 353
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Estimated value | value | m/s | fp64_t | Same as field type |
GPS Fix Rejection¶
No description
- Abbreviation: GpsFixRejection
- Identification Number: 356
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| UTC Time of Fix | utc_time | s | fp32_t | UTC time of the rejected GPS fix measured in seconds since 00:00:00 (midnight). | Same as field type |
| Reason | reason | Enumerated | uint8_t | Reason for rejection. | Same as field type |
LBL Range Acceptance¶
When the vehicle uses Long Base Line navigation, this message notifies that a new range was received from one of the acoustics transponders. The message fields are used to identify the range value and the transponder name. Also, this message has an acceptance field that indicates whether a LBL range was accepted or rejected, and if rejected, the reason why.
- Abbreviation: LblRangeAcceptance
- Identification Number: 357
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Beacon Identification Number | id | - | uint8_t | Identification number of the acoustic transponder from which the range information was received. | Same as field type |
| Range | range | m | fp32_t | Distance to the acoustic transponder. | Same as field type |
| Acceptance | acceptance | Enumerated | uint8_t | Reason for acceptance/rejection. | Same as field type |
DVL Rejection¶
When the vehicle uses Doppler Velocity Log sensor, this message notifies that a new measurement was locally rejected by the navigation filter.
- Abbreviation: DvlRejection
- Identification Number: 358
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Type of velocity | type | Bitfield | uint8_t | This field represents the type of the rejected velocity. | Same as field type |
| Reason | reason | Enumerated | uint8_t | Reason for rejection. There are two types of DVL measurement filters. An Innovation filter checks the innovation between the current measurement and the previous measurement within a certain amount of time and an Absolute filter compares the measurement with an absolute threshold value. Those filters are tested using horizontal speed measurements, i.e., measurements in the x-axis and in the y-axis. | Same as field type |
| Value | value | m/s | fp32_t | Value of the rejection. If it is an innovation rejection the value is the absolute difference between the previous accepted DVL measurement and the current one. If it is an absolute rejection the value is the current DVL measurement. | Same as field type |
| Timestep | timestep | s | fp32_t | Timestep of the rejection. The timestep is 0 for an absolute rejection since it is an instantaneous reading. For innovation rejection it is the time difference between the previous accepted DVL measurement and the current one. | Same as field type |
LBL Beacon Position Estimate¶
LBL Beacon position estimate.
- Abbreviation: LblEstimate
- Identification Number: 360
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| LBL Beacon Configuration | beacon | - | message | LBL Beacon configuration estimate. | Same as field type |
| North position | x | m | fp32_t | The North position offset of the NED field with respect to origin. | Same as field type |
| East position | y | m | fp32_t | The East position offset of the NED field with respect to origin. | Same as field type |
| North position variance | var_x | m | fp32_t | The North offset variance of the North/East/Down field with respect to LLH. | Same as field type |
| East position variance | var_y | m | fp32_t | The East offset variance of the North/East/Down field with respect to LLH. | Same as field type |
| Distance | distance | m | fp32_t | Distance between current LBL Beacon position and filter estimation. | Same as field type |
Alignment State¶
This message notifies the vehicle is ready for dead-reckoning missions.
- Abbreviation: AlignmentState
- Identification Number: 361
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| State | state | Enumerated | uint8_t | Alignment State. | Same as field type |
GroupStreamVelocity¶
The stream velocity estimated by a group of systems. Typically for water or air streams.
- Abbreviation: GroupStreamVelocity
- Identification Number: 362
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| X component (North) | x | m/s | fp64_t | X component (North). | Same as field type |
| Y component (East) | y | m/s | fp64_t | Y component (East). | Same as field type |
| Z component (Down) | z | m/s | fp64_t | Z component (Down). | Same as field type |
Airflow¶
Airspeed along with airflow angles.
- Abbreviation: Airflow
- Identification Number: 363
- Fixed Payload Size: 0
| Name | Abbreviation | Unit | Type | Description | Range |
|---|---|---|---|---|---|
| Airspeed | va | m/s | fp32_t | Airspeed, the 2-norm of the relative velocity. | Same as field type |
| Angle of attack | aoa | rad | fp32_t | Angle of attack. | Same as field type |
| Sideslip angle | ssa | rad | fp32_t | Sideslip angle. | Same as field type |