 |
DUNE: Uniform Navigational Environment
2.3.1
|
|
DUNE: Uniform Navigational Environment
2.3.1
|
Public Attributes | |
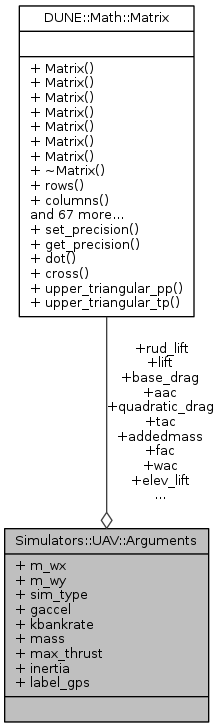
| double | m_wx |
| double | m_wy |
| std::string | sim_type |
| double | gaccel |
| double | kbankrate |
| double | mass |
| double | max_thrust |
| Matrix | aac |
| Matrix | wac |
| Matrix | tac |
| Matrix | fac |
| Matrix | addedmass |
| Matrix | inertia |
| Matrix | base_drag |
| Matrix | quadratic_drag |
| Matrix | lift |
| Matrix | elev_lift |
| Matrix | rud_lift |
| std::string | label_gps |
| Matrix Simulators::UAV::Arguments::aac |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::addedmass |
Fin aerodynamic center.
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::base_drag |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::elev_lift |
Aircraft aerodynamic Lift - Linear component.
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::fac |
Tail aerodynamic center.
Referenced by Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::gaccel |
Simulation type (3DOF, 4DOF_bank, 4DOF_alt, 5DOF, 6DOF_stabder, and 6DOF_geom)
Referenced by Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::inertia |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::kbankrate |
Referenced by Simulators::UAV::Task::Task().
| std::string Simulators::UAV::Arguments::label_gps |
Gps simulator entity id.
Referenced by Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::lift |
Aircraft aerodynamic drag - Quadratic component.
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::m_wx |
Stream speed North parameter (m/s).
Referenced by Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::m_wy |
Stream speed East parameter (m/s).
| double Simulators::UAV::Arguments::mass |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::max_thrust |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::quadratic_drag |
Aircraft aerodynamic drag - Constant component.
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::rud_lift |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| std::string Simulators::UAV::Arguments::sim_type |
UAV Model Parameters.
Referenced by Simulators::UAV::Task::onMain(), Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::tac |
Wing aerodynamic center.
Referenced by Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::wac |
Wing aerodynamic center.
Referenced by Simulators::UAV::Task::Task().
 1.8.6
1.8.6