 |
DUNE: Uniform Navigational Environment
2.4.2
|
|
DUNE: Uniform Navigational Environment
2.4.2
|
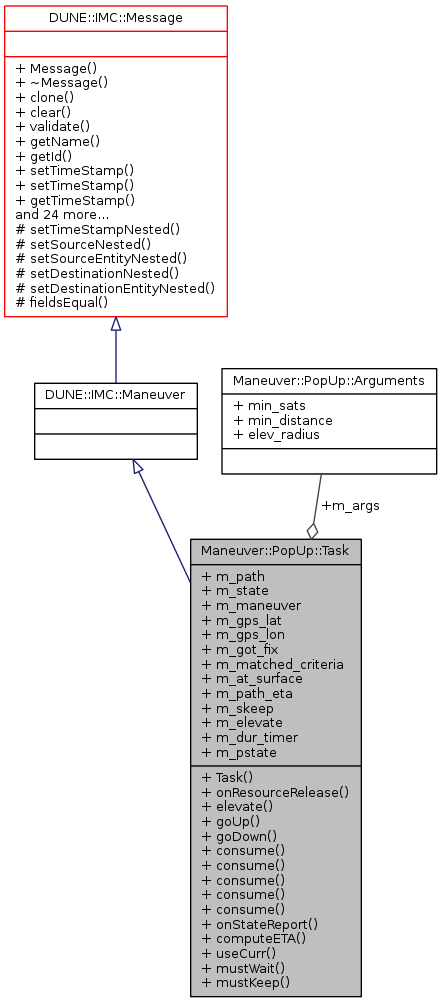
PopUp task.
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onResourceRelease (void) |
| void | elevate (float z_value, unsigned z_units, bool current) |
| void | goUp (void) |
| void | goDown (void) |
| void | consume (const IMC::PopUp *maneuver) |
| void | consume (const IMC::VehicleMedium *msg) |
| void | consume (const IMC::GpsFix *msg) |
| void | consume (const IMC::EstimatedState *state) |
| void | consume (const IMC::PathControlState *pcs) |
| void | onStateReport (void) |
| void | computeETA (void) |
| bool | useCurr (void) |
| bool | mustWait (void) |
| bool | mustKeep (void) |
 Public Member Functions inherited from DUNE::IMC::Message Public Member Functions inherited from DUNE::IMC::Message | |
| Message (void) | |
| virtual | ~Message (void) |
| virtual Message * | clone (void) const =0 |
| virtual void | clear (void)=0 |
| virtual int | validate (void) const =0 |
| virtual const char * | getName (void) const =0 |
| virtual uint16_t | getId (void) const =0 |
| double | setTimeStamp (double ts) |
| double | setTimeStamp (void) |
| double | getTimeStamp (void) const |
| uint16_t | getSource (void) const |
| void | setSource (uint16_t src) |
| uint8_t | getSourceEntity (void) const |
| void | setSourceEntity (uint8_t src_ent) |
| uint16_t | getDestination (void) const |
| void | setDestination (uint16_t dst) |
| uint8_t | getDestinationEntity (void) const |
| void | setDestinationEntity (uint8_t dst_ent) |
| virtual uint16_t | getSubId (void) const |
| virtual void | setSubId (uint16_t subid) |
| virtual fp64_t | getValueFP (void) const |
| virtual void | setValueFP (fp64_t val) |
| unsigned | getSerializationSize (void) const |
| unsigned | getPayloadSerializationSize (void) const |
| virtual unsigned | getFixedSerializationSize (void) const |
| virtual unsigned | getVariableSerializationSize (void) const |
| void | toJSON (std::ostream &os) const |
| void | toText (std::ostream &os) const |
| virtual uint8_t * | serializeFields (uint8_t *bfr) const =0 |
| virtual uint16_t | deserializeFields (const uint8_t *bfr, uint16_t len)=0 |
| virtual uint16_t | reverseDeserializeFields (const uint8_t *bfr, uint16_t len)=0 |
| virtual void | fieldsToJSON (std::ostream &os, unsigned indent_level) const |
| bool | operator== (const Message &other) const |
| bool | operator!= (const Message &other) const |
Public Attributes | |
| IMC::DesiredPath | m_path |
| IMC::EstimatedState | m_state |
| IMC::PopUp | m_maneuver |
| double | m_gps_lat |
| double | m_gps_lon |
| bool | m_got_fix |
| bool | m_matched_criteria |
| bool | m_at_surface |
| unsigned | m_path_eta |
| Maneuvers::StationKeep * | m_skeep |
| Maneuvers::Elevate * | m_elevate |
| Time::Counter< float > | m_dur_timer |
| PopUpState | m_pstate |
| Arguments | m_args |
Additional Inherited Members | |
| Protected Member Functions inherited from DUNE::IMC::Message | |
| virtual void | setTimeStampNested (double value) |
| virtual void | setSourceNested (uint16_t value) |
| virtual void | setSourceEntityNested (uint8_t value) |
| virtual void | setDestinationNested (uint16_t value) |
| virtual void | setDestinationEntityNested (uint8_t value) |
| virtual bool | fieldsEqual (const Message &other) const |
| Protected Attributes inherited from DUNE::IMC::Message | |
| Header | m_header |
|
inline |
|
inline |
Compute ETA.
References m_dur_timer, m_pstate, Maneuver::PopUp::ST_DONE, and Maneuver::PopUp::ST_WAIT.
Referenced by onStateReport().
|
inline |
References goUp(), m_dur_timer, m_maneuver, m_pstate, Maneuver::PopUp::ST_GO_TO, Maneuver::PopUp::ST_GO_UP, and useCurr().
|
inline |
Used to check if we're at the surface.
References Maneuver::PopUp::Arguments::elev_radius, m_args, m_dur_timer, m_maneuver, m_pstate, m_skeep, mustKeep(), mustWait(), Maneuver::PopUp::ST_GET_FIX, Maneuver::PopUp::ST_NEAR_SURFACE, Maneuver::PopUp::ST_SKEEP, and Maneuver::PopUp::ST_WAIT.
|
inline |
|
inline |
|
inline |
|
inline |
References Maneuver::PopUp::Arguments::elev_radius, m_args, m_elevate, and m_maneuver.
|
inline |
References elevate(), and m_maneuver.
Referenced by consume().
|
inline |
Must station keep while at surface.
References m_maneuver.
Referenced by consume().
|
inline |
Must wait some time at surface.
References m_maneuver.
Referenced by consume().
|
inline |
References computeETA().
|
inline |
Will use current position.
References m_maneuver.
Referenced by consume().
| Arguments Maneuver::PopUp::Task::m_args |
| bool Maneuver::PopUp::Task::m_at_surface |
Vehicle is not underwater.
| Time::Counter<float> Maneuver::PopUp::Task::m_dur_timer |
Timer counter for duration.
Referenced by computeETA(), and consume().
| Maneuvers::Elevate* Maneuver::PopUp::Task::m_elevate |
Elevator behavior.
Referenced by consume(), elevate(), and onResourceRelease().
| bool Maneuver::PopUp::Task::m_got_fix |
True if a fix has been received yet.
| double Maneuver::PopUp::Task::m_gps_lat |
Last GpsFix latitude.
| double Maneuver::PopUp::Task::m_gps_lon |
Last GpsFix longitude.
| IMC::PopUp Maneuver::PopUp::Task::m_maneuver |
PopUp maneuver message.
Referenced by consume(), elevate(), goDown(), mustKeep(), mustWait(), and useCurr().
| bool Maneuver::PopUp::Task::m_matched_criteria |
Matched criteria for popping up.
| IMC::DesiredPath Maneuver::PopUp::Task::m_path |
DesiredPath message.
| unsigned Maneuver::PopUp::Task::m_path_eta |
Estimated time of arrival from PathControlState.
| PopUpState Maneuver::PopUp::Task::m_pstate |
PopUp maneuver state.
Referenced by computeETA(), and consume().
| Maneuvers::StationKeep* Maneuver::PopUp::Task::m_skeep |
Station keeping behavior in case it is necessary.
Referenced by consume(), and onResourceRelease().
| IMC::EstimatedState Maneuver::PopUp::Task::m_state |
EstimatedState message.
Referenced by consume().
 1.8.6
1.8.6