 |
DUNE: Uniform Navigational Environment
2.4.2
|
|
DUNE: Uniform Navigational Environment
2.4.2
|
Public Attributes | |
| double | wx |
| double | wy |
| std::string | sim_type |
| double | gaccel |
| double | c_bank |
| double | c_speed |
| double | c_alt |
| double | l_bank_rate |
| double | l_lon_accel |
| double | l_vert_slope |
| double | mass |
| double | max_thrust |
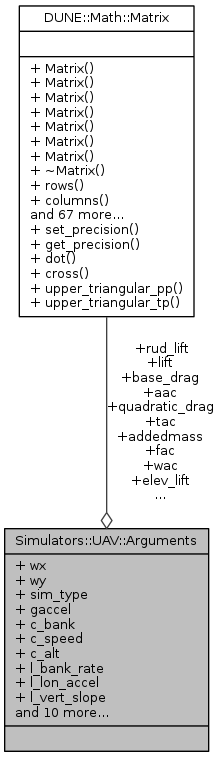
| Matrix | aac |
| Matrix | wac |
| Matrix | tac |
| Matrix | fac |
| Matrix | addedmass |
| Matrix | inertia |
| Matrix | base_drag |
| Matrix | quadratic_drag |
| Matrix | lift |
| Matrix | elev_lift |
| Matrix | rud_lift |
| std::string | label_gps |
| double | init_lat |
| double | init_lon |
| double | init_alt |
| double | init_speed |
| double | init_roll |
| double | init_yaw |
| Matrix Simulators::UAV::Arguments::aac |
Referenced by Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::addedmass |
Referenced by Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::base_drag |
Referenced by Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::c_alt |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::c_bank |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::c_speed |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::elev_lift |
Referenced by Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::fac |
Referenced by Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::gaccel |
Referenced by Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::inertia |
Referenced by Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::init_alt |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::init_lat |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::init_lon |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::init_roll |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::init_speed |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::init_yaw |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::l_bank_rate |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::l_lon_accel |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::l_vert_slope |
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| std::string Simulators::UAV::Arguments::label_gps |
Referenced by Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::lift |
Referenced by Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::mass |
Referenced by Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::max_thrust |
Referenced by Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::quadratic_drag |
Referenced by Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::rud_lift |
Referenced by Simulators::UAV::Task::Task().
| std::string Simulators::UAV::Arguments::sim_type |
UAV Model Parameters.
Referenced by Simulators::UAV::Task::onResourceAcquisition(), and Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::tac |
Referenced by Simulators::UAV::Task::Task().
| Matrix Simulators::UAV::Arguments::wac |
Referenced by Simulators::UAV::Task::Task().
| double Simulators::UAV::Arguments::wx |
| double Simulators::UAV::Arguments::wy |
Referenced by Simulators::UAV::Task::Task().
 1.8.6
1.8.6