 |
DUNE: Uniform Navigational Environment
2.5.0-rc1
|
|
DUNE: Uniform Navigational Environment
2.5.0-rc1
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| ~Task (void) | |
| void | onEntityReservation (void) |
| void | onUpdateParameters (void) |
| void | onResourceAcquisition (void) |
| void | onResourceInitialization (void) |
| void | onResourceRelease (void) |
| void | setReplyTimeout (double timeout) |
| void | consume (const IMC::SetThrusterActuation *msg) |
| void | readString (char *bfr, unsigned bfr_size) |
| bool | sendCommand (const char *cmd, char *reply, unsigned reply_size) |
| bool | sendDemand (unsigned index, int8_t value) |
| bool | resetMotor (unsigned index) |
| bool | queryCurrent (unsigned index) |
| bool | queryRPM (unsigned index) |
| void | onMain (void) |
Public Attributes | |
| SerialPort * | m_uart |
| std::vector< IMC::Current > | m_amps |
| std::vector< IMC::Rpm > | m_rpms |
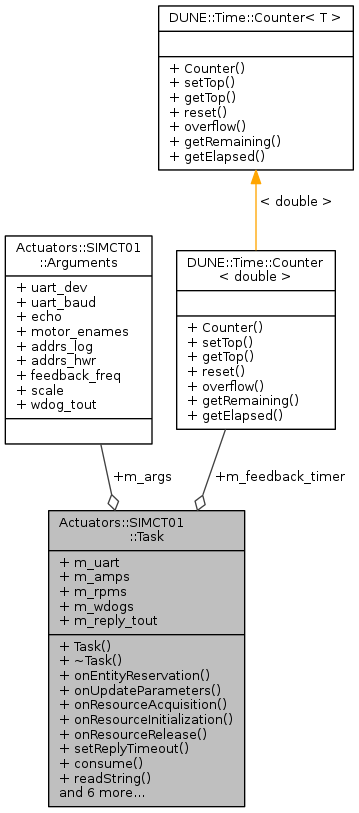
| Counter< double > | m_feedback_timer |
| std::vector< Counter< double > > | m_wdogs |
| double | m_reply_tout |
| Arguments | m_args |
|
inline |
References Actuators::SIMCT01::Arguments::addrs_hwr, Actuators::SIMCT01::Arguments::addrs_log, Actuators::SIMCT01::Arguments::echo, Actuators::SIMCT01::Arguments::feedback_freq, m_args, Actuators::SIMCT01::Arguments::motor_enames, Actuators::SIMCT01::Arguments::scale, Actuators::SIMCT01::Arguments::uart_baud, Actuators::SIMCT01::Arguments::uart_dev, and Actuators::SIMCT01::Arguments::wdog_tout.
|
inline |
References onResourceRelease().
|
inline |
|
inline |
References m_amps, m_args, m_rpms, and Actuators::SIMCT01::Arguments::motor_enames.
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
References Actuators::SIMCT01::Arguments::addrs_hwr, Actuators::SIMCT01::Arguments::addrs_log, Actuators::SIMCT01::Arguments::feedback_freq, m_amps, m_args, m_feedback_timer, m_rpms, m_uart, m_wdogs, Actuators::SIMCT01::Arguments::motor_enames, DUNE::Time::Counter< T >::setTop(), Actuators::SIMCT01::Arguments::uart_baud, and Actuators::SIMCT01::Arguments::uart_dev.
|
inline |
References Actuators::SIMCT01::Arguments::addrs_hwr, m_amps, m_args, m_wdogs, and sendCommand().
Referenced by onMain().
|
inline |
References Actuators::SIMCT01::Arguments::addrs_hwr, m_args, m_rpms, m_wdogs, and sendCommand().
Referenced by onMain().
|
inline |
References m_uart.
Referenced by sendCommand().
|
inline |
References Actuators::SIMCT01::Arguments::addrs_hwr, m_args, m_wdogs, and sendCommand().
Referenced by onResourceInitialization().
|
inline |
References Actuators::SIMCT01::Arguments::echo, m_args, m_reply_tout, m_uart, and readString().
Referenced by queryCurrent(), queryRPM(), resetMotor(), and sendDemand().
|
inline |
References Actuators::SIMCT01::Arguments::addrs_hwr, m_args, m_wdogs, and sendCommand().
Referenced by consume().
|
inline |
References m_reply_tout.
Referenced by onResourceInitialization().
| std::vector<IMC::Current> Actuators::SIMCT01::Task::m_amps |
Current messages.
Referenced by onEntityReservation(), onUpdateParameters(), and queryCurrent().
| Arguments Actuators::SIMCT01::Task::m_args |
Task arguments.
Referenced by consume(), onEntityReservation(), onMain(), onResourceAcquisition(), onResourceInitialization(), onUpdateParameters(), queryCurrent(), queryRPM(), resetMotor(), sendCommand(), sendDemand(), and Task().
| Counter<double> Actuators::SIMCT01::Task::m_feedback_timer |
Feedback timer.
Referenced by onMain(), onResourceInitialization(), and onUpdateParameters().
| double Actuators::SIMCT01::Task::m_reply_tout |
Reply timeout.
Referenced by sendCommand(), and setReplyTimeout().
| std::vector<IMC::Rpm> Actuators::SIMCT01::Task::m_rpms |
RPM messages.
Referenced by onEntityReservation(), onUpdateParameters(), and queryRPM().
| SerialPort* Actuators::SIMCT01::Task::m_uart |
Serial port handle.
Referenced by onResourceAcquisition(), onResourceRelease(), onUpdateParameters(), readString(), and sendCommand().
| std::vector<Counter<double> > Actuators::SIMCT01::Task::m_wdogs |
Watchdogs.
Referenced by onMain(), onResourceInitialization(), onUpdateParameters(), queryCurrent(), queryRPM(), resetMotor(), and sendDemand().
 1.8.6
1.8.6