 |
DUNE: Uniform Navigational Environment
2.6.0-rc1
|
|
DUNE: Uniform Navigational Environment
2.6.0-rc1
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onResourceRelease (void) |
| void | onResourceAcquisition (void) |
| void | consume (const IMC::SetServoPosition *msg) |
| void | consume (const IMC::GpsFix *msg) |
| void | consume (const IMC::SetThrusterActuation *msg) |
| Matrix | matrixJ (float roll, float pitch, float yaw) |
| void | task (void) |
Public Attributes | |
| AUVModel * | m_model |
| IMC::SimulatedState | m_sstate |
| double | m_start_time |
| double | m_last_update |
| float | m_thruster_act |
| Matrix | m_servo_pos |
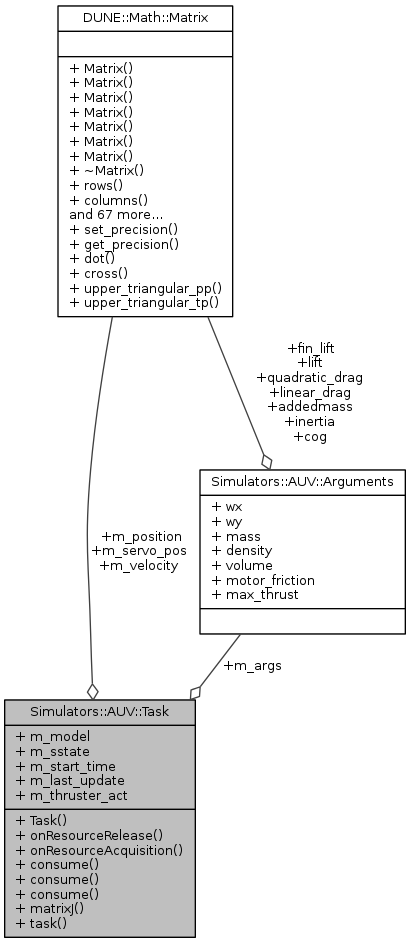
| Matrix | m_position |
| Matrix | m_velocity |
| Arguments | m_args |
|
inline |
References Simulators::AUV::Arguments::addedmass, Simulators::AUV::Arguments::cog, Simulators::AUV::Arguments::density, Simulators::AUV::Arguments::fin_lift, Simulators::AUV::Arguments::inertia, Simulators::AUV::Arguments::lift, Simulators::AUV::Arguments::linear_drag, m_args, Simulators::AUV::Arguments::mass, Simulators::AUV::Arguments::max_thrust, Simulators::AUV::Arguments::motor_friction, Simulators::AUV::Arguments::quadratic_drag, Simulators::AUV::Arguments::volume, Simulators::AUV::Arguments::wx, and Simulators::AUV::Arguments::wy.
|
inline |
References m_servo_pos.
|
inline |
References m_last_update, m_position, m_sstate, and m_start_time.
|
inline |
References m_thruster_act.
|
inline |
References DUNE::Math::Matrix::horzCat(), DUNE::Math::transpose(), and DUNE::Math::Matrix::vertCat().
Referenced by task().
|
inline |
References DUNE::Control::ModelParameters::addedmass, Simulators::AUV::Arguments::addedmass, DUNE::Control::ModelParameters::cog, Simulators::AUV::Arguments::cog, DUNE::Control::ModelParameters::density, Simulators::AUV::Arguments::density, DUNE::Control::ModelParameters::fin_lift, Simulators::AUV::Arguments::fin_lift, DUNE::Control::ModelParameters::inertia, Simulators::AUV::Arguments::inertia, DUNE::Control::ModelParameters::lift, Simulators::AUV::Arguments::lift, DUNE::Control::ModelParameters::linear_drag, Simulators::AUV::Arguments::linear_drag, m_args, m_model, DUNE::Control::ModelParameters::mass, Simulators::AUV::Arguments::mass, DUNE::Control::ModelParameters::max_thrust, Simulators::AUV::Arguments::max_thrust, DUNE::Control::ModelParameters::motor_friction, Simulators::AUV::Arguments::motor_friction, DUNE::Control::ModelParameters::quadratic_drag, Simulators::AUV::Arguments::quadratic_drag, DUNE::Control::ModelParameters::volume, and Simulators::AUV::Arguments::volume.
|
inline |
References m_model.
|
inline |
| Arguments Simulators::AUV::Task::m_args |
Task arguments.
Referenced by onResourceAcquisition(), Task(), and task().
| double Simulators::AUV::Task::m_last_update |
| AUVModel* Simulators::AUV::Task::m_model |
Simulation vehicle.
Referenced by onResourceAcquisition(), onResourceRelease(), and task().
| IMC::SimulatedState Simulators::AUV::Task::m_sstate |
| float Simulators::AUV::Task::m_thruster_act |
 1.8.6
1.8.6