 |
DUNE: Uniform Navigational Environment
2.6.0-rc1
|
|
DUNE: Uniform Navigational Environment
2.6.0-rc1
|
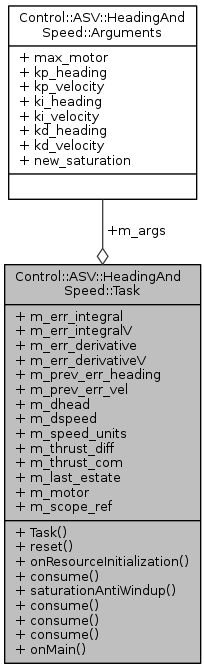
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | reset (void) |
| void | onResourceInitialization (void) |
| void | consume (const IMC::EstimatedState *msg) |
| void | saturationAntiWindup (float thrust_inc, float ki_gain, float *thrust, float *err_integral) |
| void | consume (const IMC::DesiredHeading *msg) |
| void | consume (const IMC::DesiredSpeed *msg) |
| void | consume (const IMC::ControlLoops *msg) |
| void | onMain (void) |
Public Attributes | |
| float | m_err_integral |
| float | m_err_integralV |
| float | m_err_derivative |
| float | m_err_derivativeV |
| float | m_prev_err_heading |
| float | m_prev_err_vel |
| float | m_dhead |
| float | m_dspeed |
| uint8_t | m_speed_units |
| float | m_thrust_diff |
| float | m_thrust_com |
| Delta | m_last_estate |
| IMC::SetThrusterActuation | m_motor [2] |
| uint32_t | m_scope_ref |
| Arguments | m_args |
|
inline |
References Control::ASV::HeadingAndSpeed::Arguments::kd_heading, Control::ASV::HeadingAndSpeed::Arguments::kd_velocity, Control::ASV::HeadingAndSpeed::Arguments::ki_heading, Control::ASV::HeadingAndSpeed::Arguments::ki_velocity, Control::ASV::HeadingAndSpeed::Arguments::kp_heading, Control::ASV::HeadingAndSpeed::Arguments::kp_velocity, m_args, Control::ASV::HeadingAndSpeed::Arguments::max_motor, and Control::ASV::HeadingAndSpeed::Arguments::new_saturation.
|
inline |
References Control::ASV::HeadingAndSpeed::Arguments::kd_heading, Control::ASV::HeadingAndSpeed::Arguments::kd_velocity, Control::ASV::HeadingAndSpeed::Arguments::ki_heading, Control::ASV::HeadingAndSpeed::Arguments::ki_velocity, Control::ASV::HeadingAndSpeed::Arguments::kp_heading, Control::ASV::HeadingAndSpeed::Arguments::kp_velocity, m_args, m_dhead, m_dspeed, m_err_derivative, m_err_derivativeV, m_err_integral, m_err_integralV, m_last_estate, m_motor, m_prev_err_heading, m_prev_err_vel, m_speed_units, m_thrust_com, m_thrust_diff, Control::ASV::HeadingAndSpeed::Arguments::max_motor, Control::ASV::HeadingAndSpeed::Arguments::new_saturation, and saturationAntiWindup().
|
inline |
References m_dhead.
|
inline |
References m_dspeed, and m_speed_units.
|
inline |
References m_scope_ref, and reset().
|
inline |
|
inline |
References reset().
|
inline |
References m_dspeed, m_err_integral, m_motor, m_prev_err_heading, and m_prev_err_vel.
Referenced by consume(), and onResourceInitialization().
|
inline |
References m_args, and Control::ASV::HeadingAndSpeed::Arguments::max_motor.
Referenced by consume().
| Arguments Control::ASV::HeadingAndSpeed::Task::m_args |
Referenced by consume(), saturationAntiWindup(), and Task().
| float Control::ASV::HeadingAndSpeed::Task::m_dhead |
Referenced by consume().
| float Control::ASV::HeadingAndSpeed::Task::m_err_derivative |
Referenced by consume().
| float Control::ASV::HeadingAndSpeed::Task::m_err_derivativeV |
Referenced by consume().
| float Control::ASV::HeadingAndSpeed::Task::m_err_integralV |
Referenced by consume().
| Delta Control::ASV::HeadingAndSpeed::Task::m_last_estate |
Referenced by consume().
| IMC::SetThrusterActuation Control::ASV::HeadingAndSpeed::Task::m_motor[2] |
| uint32_t Control::ASV::HeadingAndSpeed::Task::m_scope_ref |
| uint8_t Control::ASV::HeadingAndSpeed::Task::m_speed_units |
Referenced by consume().
| float Control::ASV::HeadingAndSpeed::Task::m_thrust_com |
Referenced by consume().
| float Control::ASV::HeadingAndSpeed::Task::m_thrust_diff |
Referenced by consume().
 1.8.6
1.8.6