 |
DUNE: Uniform Navigational Environment
2016.05.0
|
|
DUNE: Uniform Navigational Environment
2016.05.0
|
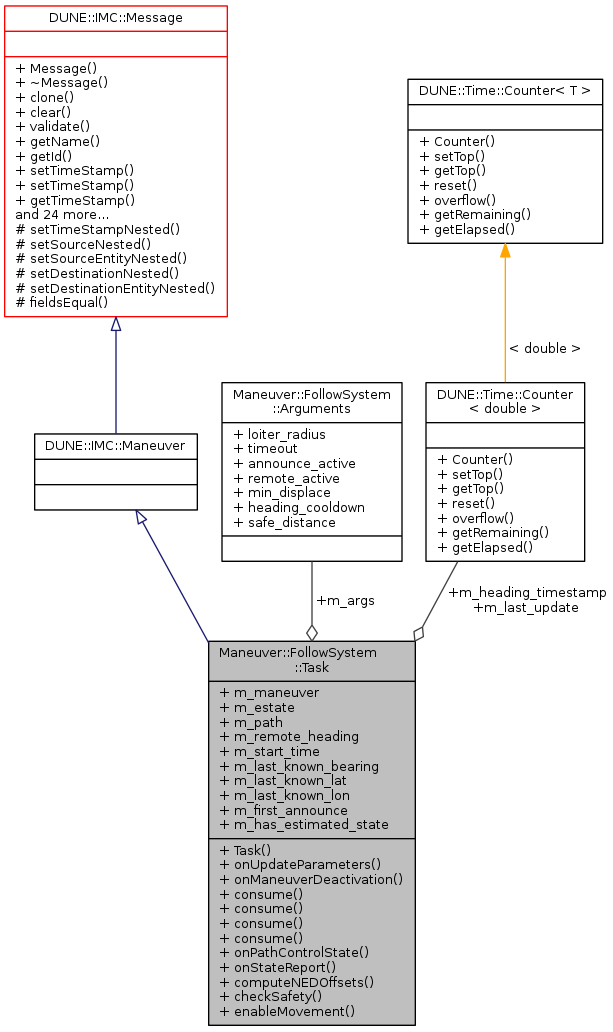
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| void | onManeuverDeactivation (void) |
| void | consume (const IMC::EstimatedState *msg) |
| void | consume (const IMC::FollowSystem *maneuver) |
| void | consume (const IMC::RemoteState *rs) |
| void | consume (const IMC::Announce *msg) |
| void | onPathControlState (const IMC::PathControlState *pcs) |
| void | onStateReport (void) |
| void | computeNEDOffsets (double lat, double lon, double depth, double psi) |
| bool | checkSafety (double lat, double lon) |
| void | enableMovement (bool enable) |
 Public Member Functions inherited from DUNE::IMC::Message Public Member Functions inherited from DUNE::IMC::Message | |
| Message (void) | |
| virtual | ~Message (void) |
| virtual Message * | clone (void) const =0 |
| virtual void | clear (void)=0 |
| virtual int | validate (void) const =0 |
| virtual const char * | getName (void) const =0 |
| virtual uint16_t | getId (void) const =0 |
| double | setTimeStamp (double ts) |
| double | setTimeStamp (void) |
| double | getTimeStamp (void) const |
| uint16_t | getSource (void) const |
| void | setSource (uint16_t src) |
| uint8_t | getSourceEntity (void) const |
| void | setSourceEntity (uint8_t src_ent) |
| uint16_t | getDestination (void) const |
| void | setDestination (uint16_t dst) |
| uint8_t | getDestinationEntity (void) const |
| void | setDestinationEntity (uint8_t dst_ent) |
| virtual uint16_t | getSubId (void) const |
| virtual void | setSubId (uint16_t subid) |
| virtual fp64_t | getValueFP (void) const |
| virtual void | setValueFP (fp64_t val) |
| unsigned | getSerializationSize (void) const |
| unsigned | getPayloadSerializationSize (void) const |
| virtual unsigned | getFixedSerializationSize (void) const |
| virtual unsigned | getVariableSerializationSize (void) const |
| void | toJSON (std::ostream &os) const |
| void | toText (std::ostream &os) const |
| virtual uint8_t * | serializeFields (uint8_t *bfr) const =0 |
| virtual uint16_t | deserializeFields (const uint8_t *bfr, uint16_t len)=0 |
| virtual uint16_t | reverseDeserializeFields (const uint8_t *bfr, uint16_t len)=0 |
| virtual void | fieldsToJSON (std::ostream &os, unsigned indent_level) const |
| bool | operator== (const Message &other) const |
| bool | operator!= (const Message &other) const |
Public Attributes | |
| IMC::FollowSystem | m_maneuver |
| IMC::EstimatedState | m_estate |
| IMC::DesiredPath | m_path |
| Counter< double > | m_heading_timestamp |
| double | m_remote_heading |
| double | m_start_time |
| Counter< double > | m_last_update |
| double | m_last_known_bearing |
| double | m_last_known_lat |
| double | m_last_known_lon |
| bool | m_first_announce |
| bool | m_has_estimated_state |
| Arguments | m_args |
Additional Inherited Members | |
| Protected Member Functions inherited from DUNE::IMC::Message | |
| virtual void | setTimeStampNested (double value) |
| virtual void | setSourceNested (uint16_t value) |
| virtual void | setSourceEntityNested (uint8_t value) |
| virtual void | setDestinationNested (uint16_t value) |
| virtual void | setDestinationEntityNested (uint8_t value) |
| virtual bool | fieldsEqual (const Message &other) const |
| Protected Attributes inherited from DUNE::IMC::Message | |
| Header | m_header |
|
inline |
References Maneuver::FollowSystem::Arguments::announce_active, Maneuver::FollowSystem::Arguments::heading_cooldown, Maneuver::FollowSystem::Arguments::loiter_radius, m_args, Maneuver::FollowSystem::Arguments::min_displace, Maneuver::FollowSystem::Arguments::remote_active, Maneuver::FollowSystem::Arguments::safe_distance, and Maneuver::FollowSystem::Arguments::timeout.
|
inline |
Routine for checking the safety of the vehicle's position this routine return true if the present location is safe and returns false otherwise.
References m_args, m_estate, m_has_estimated_state, and Maneuver::FollowSystem::Arguments::safe_distance.
Referenced by consume(), and onStateReport().
|
inline |
Function to compute new point to send to vehicle considering offsets.
References m_maneuver, and m_path.
Referenced by consume().
|
inline |
References Maneuver::FollowSystem::Arguments::announce_active, m_args, m_estate, and m_has_estimated_state.
|
inline |
|
inline |
References checkSafety(), computeNEDOffsets(), enableMovement(), Maneuver::FollowSystem::Arguments::loiter_radius, m_args, m_heading_timestamp, m_last_known_lat, m_last_known_lon, m_last_update, m_maneuver, m_path, m_remote_heading, m_start_time, Maneuver::FollowSystem::Arguments::remote_active, and DUNE::Time::Counter< T >::reset().
|
inline |
References Maneuver::FollowSystem::Arguments::announce_active, checkSafety(), computeNEDOffsets(), enableMovement(), Maneuver::FollowSystem::Arguments::loiter_radius, m_args, m_estate, m_first_announce, m_heading_timestamp, m_last_known_bearing, m_last_known_lat, m_last_known_lon, m_last_update, m_maneuver, m_path, m_remote_heading, m_start_time, Maneuver::FollowSystem::Arguments::min_displace, DUNE::Time::Counter< T >::overflow(), and DUNE::Time::Counter< T >::reset().
|
inline |
Function for enabling and disabling the control loops.
Referenced by consume(), onPathControlState(), and onStateReport().
|
inline |
References m_first_announce, and m_has_estimated_state.
|
inline |
Function to check if the vehicle is getting near to the next waypoint.
References enableMovement().
|
inline |
|
inline |
| Arguments Maneuver::FollowSystem::Task::m_args |
Referenced by checkSafety(), consume(), onUpdateParameters(), and Task().
| IMC::EstimatedState Maneuver::FollowSystem::Task::m_estate |
Vehicle's Estimated State.
Referenced by checkSafety(), and consume().
| bool Maneuver::FollowSystem::Task::m_first_announce |
is it the first time consume announce is being ran?
Referenced by consume(), and onManeuverDeactivation().
| bool Maneuver::FollowSystem::Task::m_has_estimated_state |
this boolean tells us if we have an estimated state already
Referenced by checkSafety(), consume(), and onManeuverDeactivation().
| Counter<double> Maneuver::FollowSystem::Task::m_heading_timestamp |
Remote State computed heading's timestamp, for evaluating the best heading to be used.
Referenced by consume(), and onUpdateParameters().
| double Maneuver::FollowSystem::Task::m_last_known_bearing |
variable to hold the last known bearing
Referenced by consume().
| double Maneuver::FollowSystem::Task::m_last_known_lat |
variable that will hold the last known latittude
Referenced by consume(), and onStateReport().
| double Maneuver::FollowSystem::Task::m_last_known_lon |
variable that will hold the last known longitude
Referenced by consume(), and onStateReport().
| Counter<double> Maneuver::FollowSystem::Task::m_last_update |
the last Clock::get() when the neighbor system's position was updated
Referenced by consume(), onStateReport(), and onUpdateParameters().
| IMC::FollowSystem Maneuver::FollowSystem::Task::m_maneuver |
Variable to save the maneuver's data.
Referenced by computeNEDOffsets(), consume(), and onStateReport().
| IMC::DesiredPath Maneuver::FollowSystem::Task::m_path |
Desired path to be thrown.
Referenced by computeNEDOffsets(), and consume().
| double Maneuver::FollowSystem::Task::m_remote_heading |
this variable will hold the value of the heading computed when using the announce method instead of the remote state.
Referenced by consume().
| double Maneuver::FollowSystem::Task::m_start_time |
the start time of the maneuver measured at consume maneuver
Referenced by consume(), and onStateReport().
 1.8.6
1.8.6