 |
DUNE: Uniform Navigational Environment
2016.05.0
|
|
DUNE: Uniform Navigational Environment
2016.05.0
|
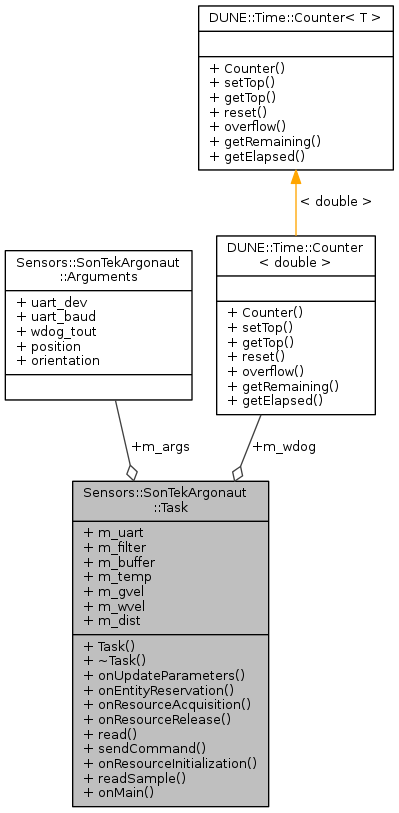
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| ~Task (void) | |
| void | onUpdateParameters (void) |
| void | onEntityReservation (void) |
| void | onResourceAcquisition (void) |
| void | onResourceRelease (void) |
| bool | read (const char *str, double timeout=1.0) |
| bool | sendCommand (const char *str, const char *reply, double timeout=2.0) |
| void | onResourceInitialization (void) |
| void | readSample (void) |
| void | onMain (void) |
Public Attributes | |
| SerialPort * | m_uart |
| Navigation::BeamFilter * | m_filter |
| char | m_buffer [512] |
| IMC::Temperature | m_temp |
| IMC::GroundVelocity | m_gvel |
| IMC::WaterVelocity | m_wvel |
| IMC::Distance | m_dist [c_beam_count] |
| Counter< double > | m_wdog |
| Arguments | m_args |
|
inline |
|
inline |
References onResourceRelease().
|
inline |
References m_dist.
|
inline |
References m_wdog, DUNE::Time::Counter< T >::overflow(), and readSample().
|
inline |
|
inline |
References m_uart, read(), and sendCommand().
|
inline |
|
inline |
|
inline |
References m_uart.
Referenced by onResourceInitialization(), and sendCommand().
|
inline |
|
inline |
References m_uart, and read().
Referenced by onResourceInitialization().
| Arguments Sensors::SonTekArgonaut::Task::m_args |
Task arguments.
Referenced by onResourceAcquisition(), onUpdateParameters(), and Task().
| char Sensors::SonTekArgonaut::Task::m_buffer[512] |
Internal buffer.
Referenced by readSample().
| IMC::Distance Sensors::SonTekArgonaut::Task::m_dist[c_beam_count] |
Distance.
Referenced by onEntityReservation(), onUpdateParameters(), and readSample().
| Navigation::BeamFilter* Sensors::SonTekArgonaut::Task::m_filter |
Beam Filter.
Referenced by onResourceAcquisition(), onResourceRelease(), and readSample().
| IMC::GroundVelocity Sensors::SonTekArgonaut::Task::m_gvel |
Ground velocity.
Referenced by readSample().
| IMC::Temperature Sensors::SonTekArgonaut::Task::m_temp |
Temperature.
Referenced by readSample().
| SerialPort* Sensors::SonTekArgonaut::Task::m_uart |
Serial port.
Referenced by onResourceAcquisition(), onResourceInitialization(), onResourceRelease(), read(), readSample(), and sendCommand().
| Counter<double> Sensors::SonTekArgonaut::Task::m_wdog |
Input watchdog.
Referenced by onMain(), onUpdateParameters(), and readSample().
| IMC::WaterVelocity Sensors::SonTekArgonaut::Task::m_wvel |
Water velocity.
Referenced by readSample().
 1.8.6
1.8.6