 |
DUNE: Uniform Navigational Environment
2016.05.0
|
|
DUNE: Uniform Navigational Environment
2016.05.0
|
Public Attributes | |
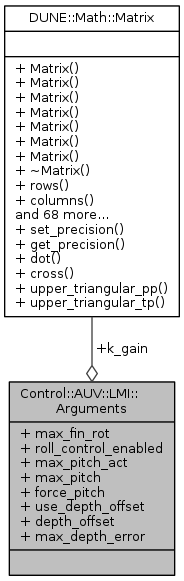
| float | max_fin_rot |
| bool | roll_control_enabled |
| float | max_pitch_act |
| float | max_pitch |
| bool | force_pitch |
| bool | use_depth_offset |
| float | depth_offset |
| float | max_depth_error |
| Matrix | k_gain |
| float Control::AUV::LMI::Arguments::depth_offset |
Fixed depth offset.
Referenced by Control::AUV::LMI::Task::onEstimatedState(), and Control::AUV::LMI::Task::Task().
| bool Control::AUV::LMI::Arguments::force_pitch |
Force pitch at surface.
Referenced by Control::AUV::LMI::Task::onEstimatedState(), and Control::AUV::LMI::Task::Task().
| Matrix Control::AUV::LMI::Arguments::k_gain |
Gain Matrix.
Referenced by Control::AUV::LMI::Task::onEstimatedState(), Control::AUV::LMI::Task::onUpdateParameters(), and Control::AUV::LMI::Task::Task().
| float Control::AUV::LMI::Arguments::max_depth_error |
Maximum admissible depth error.
Referenced by Control::AUV::LMI::Task::onEstimatedState(), and Control::AUV::LMI::Task::Task().
| float Control::AUV::LMI::Arguments::max_fin_rot |
Maximum fin rotation.
Referenced by Control::AUV::LMI::Task::onEstimatedState(), and Control::AUV::LMI::Task::Task().
| float Control::AUV::LMI::Arguments::max_pitch |
Maximum pitch reference.
Referenced by Control::AUV::LMI::Task::onEstimatedState(), Control::AUV::LMI::Task::onUpdateParameters(), and Control::AUV::LMI::Task::Task().
| float Control::AUV::LMI::Arguments::max_pitch_act |
Maximum pitch actuation.
Referenced by Control::AUV::LMI::Task::onEstimatedState(), Control::AUV::LMI::Task::onUpdateParameters(), and Control::AUV::LMI::Task::Task().
| bool Control::AUV::LMI::Arguments::roll_control_enabled |
Enable or disable roll control.
Referenced by Control::AUV::LMI::Task::onEstimatedState(), and Control::AUV::LMI::Task::Task().
| bool Control::AUV::LMI::Arguments::use_depth_offset |
Use a fixed depth offset.
Referenced by Control::AUV::LMI::Task::onEstimatedState(), and Control::AUV::LMI::Task::Task().
 1.8.6
1.8.6