 |
DUNE: Uniform Navigational Environment
2017.01.0
|
|
DUNE: Uniform Navigational Environment
2017.01.0
|
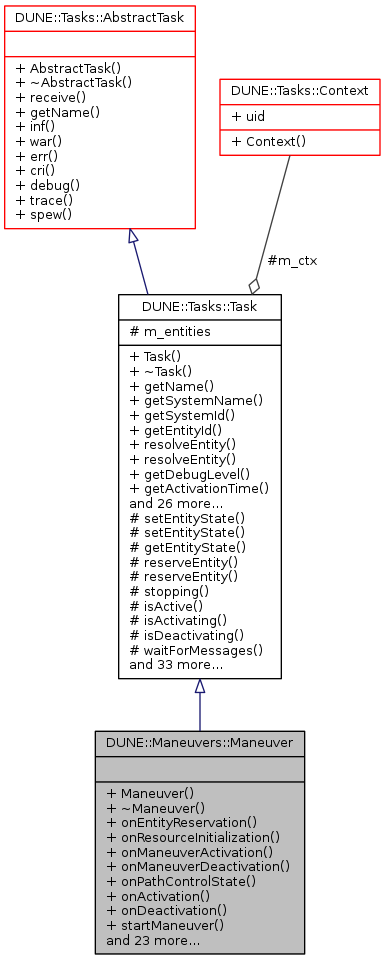
Base abstract class for maneuver tasks.
Public Member Functions | |
| Maneuver (const std::string &name, Tasks::Context &ctx) | |
| virtual | ~Maneuver () |
| void | onEntityReservation (void) |
| void | onResourceInitialization (void) |
| virtual void | onManeuverActivation (void) |
| virtual void | onManeuverDeactivation (void) |
| virtual void | onPathControlState (const IMC::PathControlState *pcs) |
| void | onActivation (void) |
| void | onDeactivation (void) |
| template<typename T , typename M > | |
| void | startManeuver (const M *maneuver) |
| template<typename T , typename M > | |
| void | bindToManeuver (void) |
| template<typename T > | |
| void | bindToManeuvers (T *task_obj, const std::vector< uint32_t > &list) |
| template<typename M , typename T > | |
| void | consumeIfActive (const M *msg) |
| template<typename M , typename T > | |
| void | bind (T *task_obj, bool always=false) |
| void | consume (const IMC::StopManeuver *sm) |
| void | consume (const IMC::PathControlState *pcs) |
| void | setControl (uint32_t mask) |
| void | setEntityId (unsigned eid) |
| void | dispatch (IMC::Message *msg, unsigned int flags=0) |
| void | dispatch (IMC::Message &msg, unsigned int flags=0) |
| void | dispatch (IMC::DesiredPath *msg, unsigned int flags=0) |
| void | dispatch (IMC::DesiredPath &msg, unsigned int flags=0) |
| virtual void | onStateReport (void) |
| void | updateLoops (const IMC::ControlLoops *cl) |
| void | signalError (const std::string &msg) |
| void | signalInvalidZ (void) |
| void | signalNoAltitude (void) |
| void | signalCompletion (const std::string &msg="done") |
| void | signalProgress (uint16_t time_left, const std::string &msg) |
| void | signalProgress (const std::string &msg) |
| void | signalProgress (uint16_t time_left) |
| void | signalProgress (void) |
| void | onMain (void) |
 Public Member Functions inherited from DUNE::Tasks::Task Public Member Functions inherited from DUNE::Tasks::Task | |
| Task (const std::string &name, Context &context) | |
| virtual | ~Task (void) |
| const char * | getName (void) const |
| const char * | getSystemName (void) const |
| unsigned int | getSystemId (void) const |
| unsigned int | getEntityId (void) const |
| unsigned int | resolveEntity (const std::string &label) const |
| std::string | resolveEntity (unsigned int id) const |
| DebugLevel | getDebugLevel (void) const |
| uint16_t | getActivationTime (void) const |
| uint16_t | getDeactivationTime (void) const |
| unsigned int | resolveSystemName (const std::string &name) const |
| const char * | resolveSystemId (unsigned int id) const |
| void | loadConfig (void) |
| void | setPriority (unsigned int value) |
| unsigned int | getPriority (void) const |
| void | inf (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void | war (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void | err (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void | cri (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void | debug (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void | trace (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void | spew (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void void | dispatch (IMC::Message *msg, unsigned int flags=0) |
| void | dispatch (IMC::Message &msg, unsigned int flags=0) |
| void | dispatchReply (const IMC::Message &original, IMC::Message &msg, unsigned int flags=0) |
| void | receive (const IMC::Message *msg) |
| void | reserveEntities (void) |
| void | resolveEntities (void) |
| void | acquireResources (void) |
| void | releaseResources (void) |
| void | initializeResources (void) |
| void | updateParameters (bool act_deact=true) |
| void | writeParamsXML (std::ostream &os) const |
| const char * | getEntityLabel (void) const |
| void | setEntityLabel (const std::string &label) |
| Public Member Functions inherited from DUNE::Tasks::AbstractTask | |
| AbstractTask (void) | |
| virtual | ~AbstractTask (void) |
| Public Member Functions inherited from DUNE::Concurrency::Thread | |
| Thread (void) | |
| virtual | ~Thread (void) |
| int | getProcessorUsage (void) |
| Public Member Functions inherited from DUNE::Concurrency::Runnable | |
| Runnable (void) | |
| virtual | ~Runnable (void) |
| void | start (void) |
| void | stop (void) |
| void | join (void) |
| void | stopAndJoin (void) |
| void | setPriority (Scheduler::Policy policy, unsigned priority) |
| unsigned | getPriority (void) |
| State | getState (void) |
| bool | isCreated (void) |
| bool | isStopping (void) |
| bool | isRunning (void) |
| bool | isStarting (void) |
| bool | isDead (void) |
Additional Inherited Members | |
| Public Types inherited from DUNE::Concurrency::Runnable | |
| enum | State { StateStarting, StateRunning, StateStopping, StateDead, StateUnknown } |
| Protected Member Functions inherited from DUNE::Tasks::Task | |
| void | setEntityState (IMC::EntityState::StateEnum state, Status::Code code) |
| void | setEntityState (IMC::EntityState::StateEnum state, const std::string &description) |
| IMC::EntityState::StateEnum | getEntityState (void) const |
| unsigned int | reserveEntity (const std::string &label) |
| template<typename E > | |
| E * | reserveEntity (const std::string &label) |
| bool | stopping (void) |
| bool | isActive (void) const |
| bool | isActivating (void) const |
| bool | isDeactivating (void) const |
| void | waitForMessages (double timeout) |
| void | consumeMessages (void) |
| template<typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename Y , typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename T > | |
| bool | paramChanged (T &var) |
| void | paramActive (Parameter::Scope def_scope, Parameter::Visibility def_visibility, bool def_value=false) |
| void | setParamSectionEditor (const std::string &name) |
| template<typename M , typename T > | |
| void | bind (T *task_obj, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list) |
| template<typename T , typename M > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< std::string > &list) |
| void | requestActivation (void) |
| void | requestDeactivation (void) |
| void | activate (void) |
| void | activationFailed (const std::string &reason) |
| void | deactivate (void) |
| void | deactivationFailed (const std::string &reason) |
| virtual bool | onWriteParamsXML (std::ostream &os) const |
| virtual void | onEntityResolution (void) |
| virtual void | onReportEntityState (void) |
| virtual void | onResourceAcquisition (void) |
| virtual void | onResourceRelease (void) |
| virtual void | onUpdateParameters (void) |
| virtual void | onRequestActivation (void) |
| virtual void | onRequestDeactivation (void) |
| virtual void | onQueryEntityParameters (const IMC::QueryEntityParameters *msg) |
| virtual void | onSetEntityParameters (const IMC::SetEntityParameters *msg) |
| virtual void | onPushEntityParameters (const IMC::PushEntityParameters *msg) |
| virtual void | onPopEntityParameters (const IMC::PopEntityParameters *msg) |
| Protected Member Functions inherited from DUNE::Concurrency::Thread | |
| void | startImpl (void) |
| void | stopImpl (void) |
| void | joinImpl (void) |
| void | setPriorityImpl (Scheduler::Policy policy, unsigned priority) |
| unsigned | getPriorityImpl (void) |
| Protected Attributes inherited from DUNE::Tasks::Task | |
| Context & | m_ctx |
| std::vector < Entities::BasicEntity * > | m_entities |
| DUNE::Maneuvers::Maneuver::Maneuver | ( | const std::string & | name, |
| Tasks::Context & | ctx | ||
| ) |
Constructor.
|
virtual |
Destructor.
|
inline |
|
inline |
|
inline |
| void DUNE::Maneuvers::Maneuver::consume | ( | const IMC::StopManeuver * | sm | ) |
Consumer for StopManeuver message.
| sm | message to consume. |
References DUNE::IMC::ManeuverControlState::eta, DUNE::IMC::ManeuverControlState::info, DUNE::IMC::ManeuverControlState::MCS_STOPPED, and DUNE::IMC::ManeuverControlState::state.
Referenced by consumeIfActive(), and startManeuver().
| void DUNE::Maneuvers::Maneuver::consume | ( | const IMC::PathControlState * | pcs | ) |
Consumer for PathControlState message.
| pcs | message to consume. |
References DUNE::IMC::PathControlState::path_ref.
|
inline |
References consume(), and DUNE::Tasks::Task::isActive().
|
inline |
Dispatch needs to be handled in a special fashion for DesiredPath.
This function handles every other kind of message.
| [in] | msg | message pointer. |
| [in] | flags | bitfield with flags. |
References DUNE::Tasks::DF_KEEP_SRC_EID, and DUNE::IMC::Message::setSourceEntity().
Referenced by dispatch().
|
inline |
Dispatch needs to be handled in a special fashion for DesiredPath.
This function handles every other kind of message.
| [in] | msg | message reference. |
| [in] | flags | bitfield with flags. |
References dispatch().
|
inline |
Dispatch needs to be handled in a special fashion for DesiredPath.
| [in] | msg | message pointer. |
| [in] | flags | bitfield with flags. |
References DUNE::Tasks::DF_KEEP_SRC_EID, DUNE::IMC::DesiredPath::path_ref, and DUNE::IMC::Message::setSourceEntity().
|
inline |
Dispatch needs to be handled in a special fashion for DesiredPath.
| [in] | msg | message reference. |
| [in] | flags | bitfield with flags. |
References dispatch().
|
virtual |
On task activation Should be used only by parent class Maneuver.
Reimplemented from DUNE::Tasks::Task.
References DUNE::Status::CODE_ACTIVE, and DUNE::IMC::EntityState::ESTA_NORMAL.
|
virtual |
On task deactivation Should be used only by parent class Maneuver.
Reimplemented from DUNE::Tasks::Task.
References DUNE::Status::CODE_IDLE, and DUNE::IMC::EntityState::ESTA_NORMAL.
|
virtual |
On entity reservation.
Reimplemented from DUNE::Tasks::Task.
|
virtual |
Implements DUNE::Tasks::Task.
References DUNE::IMC::RegisterManeuver::mid.
|
inlinevirtual |
On maneuver activation.
|
inlinevirtual |
On maneuver deactivation.
|
inlinevirtual |
On Path Control State.
|
inlinevirtual |
On resource initialization.
Reimplemented from DUNE::Tasks::Task.
References DUNE::Status::CODE_IDLE, DUNE::IMC::EntityState::ESTA_NORMAL, and DUNE::Tasks::Task::setEntityState().
|
inlinevirtual |
State report handler.
It should be overriden by maneuvers where it convenient to do so in time-triggered manner rather than in response to a particular message.
| void DUNE::Maneuvers::Maneuver::setControl | ( | uint32_t | mask | ) |
Set or reconfigure control loops used by maneuver task.
| mask | mask identifying controllers that should be made active. |
References DUNE::IMC::CL_ALL, DUNE::IMC::ControlLoops::CL_DISABLE, DUNE::IMC::ControlLoops::CL_ENABLE, DUNE::IMC::ControlLoops::enable, DUNE::IMC::ControlLoops::mask, and DUNE::IMC::ControlLoops::scope_ref.
|
inline |
Set entity Id for dispatching message Useful for maneuvers binding to more than one maneuver message.
| void DUNE::Maneuvers::Maneuver::signalCompletion | ( | const std::string & | msg = "done" | ) |
Signal an error.
This method should be used by subclasses to signal maneuver completion.
| msg | completion message |
References DUNE::IMC::ManeuverControlState::eta, DUNE::IMC::ManeuverControlState::info, DUNE::IMC::ManeuverControlState::MCS_DONE, and DUNE::IMC::ManeuverControlState::state.
| void DUNE::Maneuvers::Maneuver::signalError | ( | const std::string & | msg | ) |
Signal an error.
This method should be used by subclasses to signal an error condition.
| msg | error message |
References DUNE::IMC::ManeuverControlState::eta, DUNE::IMC::ManeuverControlState::info, DUNE::IMC::ManeuverControlState::MCS_ERROR, and DUNE::IMC::ManeuverControlState::state.
| void DUNE::Maneuvers::Maneuver::signalInvalidZ | ( | void | ) |
Signal invalid Z reference This method should be used by subclasses to signal an error condition.
| void DUNE::Maneuvers::Maneuver::signalNoAltitude | ( | void | ) |
Signal no altitude error.
This method should be used by subclasses to signal an error condition.
| void DUNE::Maneuvers::Maneuver::signalProgress | ( | uint16_t | time_left, |
| const std::string & | msg | ||
| ) |
Signal maneuver progress.
| time_left | estimated time for completion. |
| msg | human-readable information. |
References DUNE::IMC::ManeuverControlState::eta, DUNE::IMC::ManeuverControlState::info, DUNE::IMC::ManeuverControlState::MCS_EXECUTING, and DUNE::IMC::ManeuverControlState::state.
Referenced by signalProgress(), and startManeuver().
|
inline |
|
inline |
Signal maneuver progress.
| time_left | estimated time for completion. |
References signalProgress().
|
inline |
Signal maneuver progress.
References signalProgress().
|
inline |
Method fired on maneuver startup.
It performs some initialization, then delegates handling on the task's consume method for the message.
| maneuver | maneuver object |
References consume(), DUNE::Tasks::Task::debug(), DUNE::Tasks::Task::requestActivation(), and signalProgress().
| void DUNE::Maneuvers::Maneuver::updateLoops | ( | const IMC::ControlLoops * | cl | ) |
Update active control loops.
| cl | control loops message |
References DUNE::IMC::ControlLoops::CL_ENABLE, DUNE::IMC::ControlLoops::enable, and DUNE::IMC::ControlLoops::mask.
 1.8.6
1.8.6