 |
DUNE: Uniform Navigational Environment
2017.01.0
|
|
DUNE: Uniform Navigational Environment
2017.01.0
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onActivation (void) |
| void | onDeactivation (void) |
| void | consume (const IMC::ControlLoops *c_loops) |
| void | onEntityResolution (void) |
| void | consume (const IMC::IndicatedSpeed *airspeed) |
| void | consume (const IMC::DesiredZ *desired_z) |
| void | consume (const IMC::EstimatedState *state) |
| void | task (void) |
Public Attributes | |
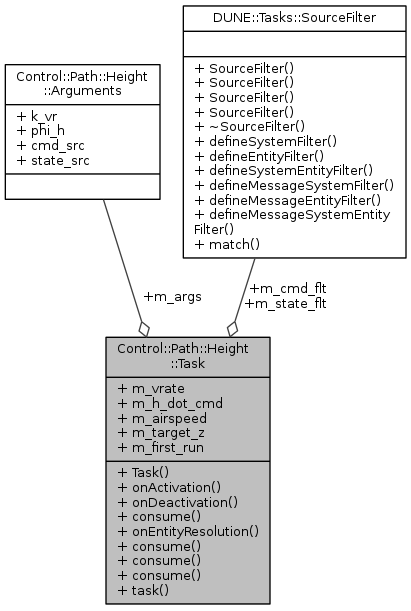
| Arguments | m_args |
| IMC::DesiredVerticalRate | m_vrate |
| double | m_h_dot_cmd |
| double | m_airspeed |
| double | m_target_z |
| bool | m_first_run |
| DUNE::Tasks::SourceFilter * | m_cmd_flt |
| DUNE::Tasks::SourceFilter * | m_state_flt |
|
inline |
|
inline |
|
inline |
References m_airspeed.
|
inline |
References m_cmd_flt, m_target_z, and DUNE::Tasks::SourceFilter::match().
|
inline |
|
inline |
References m_first_run.
|
inline |
|
inline |
|
inline |
References m_vrate.
| double Control::Path::Height::Task::m_airspeed |
Referenced by consume().
| Arguments Control::Path::Height::Task::m_args |
Referenced by consume(), onEntityResolution(), and Task().
| DUNE::Tasks::SourceFilter* Control::Path::Height::Task::m_cmd_flt |
Commands filter.
Referenced by consume(), and onEntityResolution().
| bool Control::Path::Height::Task::m_first_run |
Referenced by consume(), and onActivation().
| double Control::Path::Height::Task::m_h_dot_cmd |
Referenced by consume().
| DUNE::Tasks::SourceFilter* Control::Path::Height::Task::m_state_flt |
EstimatedState filter.
Referenced by consume(), and onEntityResolution().
| double Control::Path::Height::Task::m_target_z |
Referenced by consume().
 1.8.6
1.8.6