 |
DUNE: Uniform Navigational Environment
2019.02.0
|
|
DUNE: Uniform Navigational Environment
2019.02.0
|
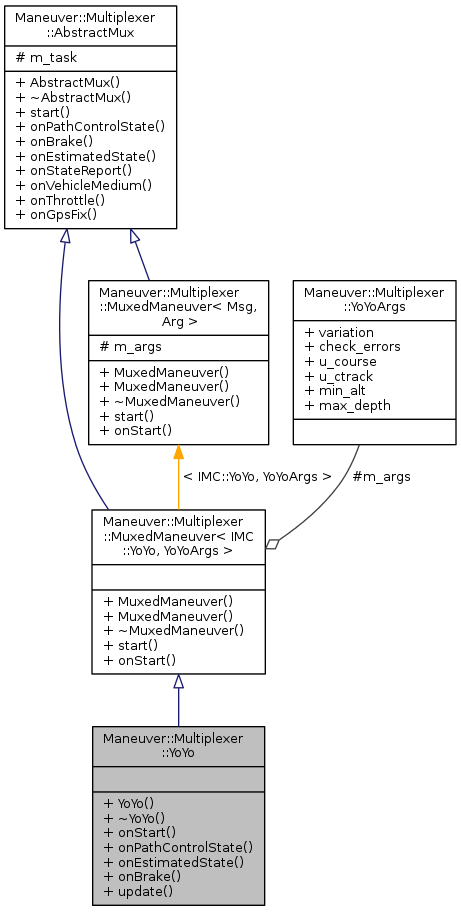
Yoyo maneuver.
Public Member Functions | |
| YoYo (Maneuvers::Maneuver *task, YoYoArgs *args) | |
| ~YoYo (void) | |
| void | onStart (const IMC::YoYo *maneuver) |
| void | onPathControlState (const IMC::PathControlState *pcs) |
| void | onEstimatedState (const IMC::EstimatedState *msg) |
| void | onBrake (const IMC::Brake *msg) |
| void | update (double depth, double alt, double theta) |
 Public Member Functions inherited from Maneuver::Multiplexer::MuxedManeuver< IMC::YoYo, YoYoArgs > Public Member Functions inherited from Maneuver::Multiplexer::MuxedManeuver< IMC::YoYo, YoYoArgs > | |
| MuxedManeuver (Maneuvers::Maneuver *task, YoYoArgs *args) | |
| MuxedManeuver (Maneuvers::Maneuver *task) | |
| virtual | ~MuxedManeuver (void) |
| void | start (const IMC::Maneuver *maneuver) |
| Public Member Functions inherited from Maneuver::Multiplexer::AbstractMux | |
| AbstractMux (Maneuvers::Maneuver *task) | |
| virtual | ~AbstractMux (void) |
| virtual void | onStateReport (void) |
| virtual void | onVehicleMedium (const IMC::VehicleMedium *msg) |
| virtual void | onThrottle (const IMC::Throttle *msg) |
| virtual void | onGpsFix (const IMC::GpsFix *msg) |
Additional Inherited Members | |
| Protected Attributes inherited from Maneuver::Multiplexer::MuxedManeuver< IMC::YoYo, YoYoArgs > | |
| YoYoArgs * | m_args |
| Protected Attributes inherited from Maneuver::Multiplexer::AbstractMux | |
| Maneuvers::Maneuver * | m_task |
|
inline |
Default constructor.
| [in] | task | pointer to Maneuver task |
| [in] | args | yoyo arguments |
|
inline |
Destructor.
|
inlinevirtual |
On Brake message.
Reimplemented from Maneuver::Multiplexer::AbstractMux.
References DUNE::Control::YoYoMotion::startedBraking().
|
inlinevirtual |
On EstimatedState message.
| [in] | msg | EstimatedState message |
Reimplemented from Maneuver::Multiplexer::AbstractMux.
References Maneuver::Multiplexer::AbstractMux::m_task, and update().
|
inlinevirtual |
On PathControlState message.
| [in] | pcs | pointer to PathControlState message |
Reimplemented from Maneuver::Multiplexer::AbstractMux.
References Maneuver::Multiplexer::YoYoArgs::check_errors, Maneuver::Multiplexer::MuxedManeuver< IMC::YoYo, YoYoArgs >::m_args, Maneuver::Multiplexer::AbstractMux::m_task, Maneuver::Multiplexer::YoYoArgs::u_course, and Maneuver::Multiplexer::YoYoArgs::u_ctrack.
|
inlinevirtual |
Start maneuver function.
| [in] | maneuver | yoyo maneuver message |
Implements Maneuver::Multiplexer::MuxedManeuver< IMC::YoYo, YoYoArgs >.
References Maneuver::Multiplexer::MuxedManeuver< IMC::YoYo, YoYoArgs >::m_args, Maneuver::Multiplexer::AbstractMux::m_task, Maneuver::Multiplexer::YoYoArgs::max_depth, Maneuver::Multiplexer::YoYoArgs::min_alt, and Maneuver::Multiplexer::YoYoArgs::variation.
|
inline |
update the maneuver with a depth or altitude value a negative value will be interpreted as an altitude
| [in] | depth | current depth position |
| [in] | alt | current altitude position |
| [in] | theta | current pitch angle |
References Maneuver::Multiplexer::AbstractMux::m_task, DUNE::Control::YoYoMotion::stabilize(), and DUNE::Control::YoYoMotion::update().
Referenced by onEstimatedState().
 1.8.6
1.8.6