 |
DUNE: Uniform Navigational Environment
2019.02.0
|
|
DUNE: Uniform Navigational Environment
2019.02.0
|
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| virtual | ~Task (void) |
| void | onManeuverDeactivation (void) |
| void | consume (const IMC::RowsCoverage *maneuver) |
| void | consume (const IMC::EstimatedState *msg) |
| void | onPathControlState (const IMC::PathControlState *pcs) |
| void | sendPath (double lat, double lon) |
Public Attributes | |
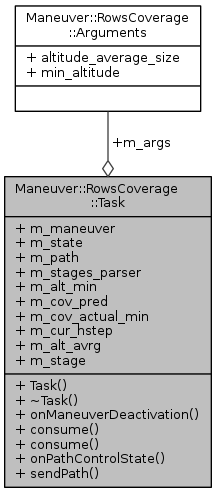
| IMC::RowsCoverage | m_maneuver |
| IMC::EstimatedState | m_state |
| IMC::DesiredPath | m_path |
| Maneuvers::RowsStages * | m_stages_parser |
| float | m_alt_min |
| double | m_cov_pred |
| double | m_cov_actual_min |
| double | m_cur_hstep |
| Math::MovingAverage< float > * | m_alt_avrg |
| unsigned int | m_stage |
| Arguments | m_args |
|
inline |
Constructor.
| [in] | name | task name. |
| [in] | ctx | context. |
References Maneuver::RowsCoverage::Arguments::altitude_average_size, m_args, and Maneuver::RowsCoverage::Arguments::min_altitude.
|
inlinevirtual |
Destructor.
References m_alt_avrg, and m_stages_parser.
|
inline |
|
inline |
References m_alt_avrg, m_alt_min, m_args, and Maneuver::RowsCoverage::Arguments::min_altitude.
|
inline |
References m_alt_avrg, and m_stages_parser.
|
inline |
On PathControlState message.
| [in] | pcs | pointer to PathControlState message |
References m_alt_avrg, m_alt_min, m_cov_actual_min, m_cov_pred, m_cur_hstep, m_maneuver, m_stage, m_stages_parser, and sendPath().
|
inline |
Send new desired path.
| [in] | lat | latitude for new desired path |
| [in] | lon | longitude for new desired path |
References m_path.
Referenced by consume(), and onPathControlState().
| Math::MovingAverage<float>* Maneuver::RowsCoverage::Task::m_alt_avrg |
Moving average for min. altitude calculation.
Referenced by consume(), onManeuverDeactivation(), onPathControlState(), and ~Task().
| float Maneuver::RowsCoverage::Task::m_alt_min |
Minimum altitude holder for hstep calculation.
Referenced by consume(), and onPathControlState().
| double Maneuver::RowsCoverage::Task::m_cov_actual_min |
Calculated coverage with min. altitude.
Referenced by consume(), and onPathControlState().
| double Maneuver::RowsCoverage::Task::m_cov_pred |
Predicted coverage.
Referenced by consume(), and onPathControlState().
| double Maneuver::RowsCoverage::Task::m_cur_hstep |
Current hstep in use.
Referenced by consume(), and onPathControlState().
| IMC::RowsCoverage Maneuver::RowsCoverage::Task::m_maneuver |
Referenced by consume(), and onPathControlState().
| IMC::DesiredPath Maneuver::RowsCoverage::Task::m_path |
DesiredPath.
Referenced by consume(), and sendPath().
| unsigned int Maneuver::RowsCoverage::Task::m_stage |
Stage counter.
Referenced by consume(), and onPathControlState().
| Maneuvers::RowsStages* Maneuver::RowsCoverage::Task::m_stages_parser |
Rows stages parser.
Referenced by consume(), onManeuverDeactivation(), onPathControlState(), and ~Task().
| IMC::EstimatedState Maneuver::RowsCoverage::Task::m_state |
EstimatedState.
 1.8.6
1.8.6