 |
DUNE: Uniform Navigational Environment
2019.02.0
|
|
DUNE: Uniform Navigational Environment
2019.02.0
|
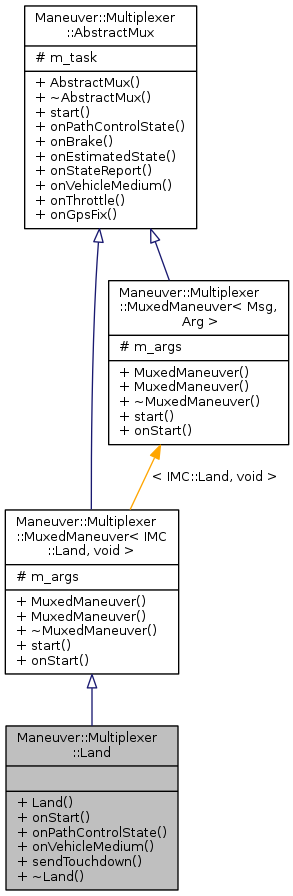
Land maneuver.
Public Member Functions | |
| Land (Maneuvers::Maneuver *task) | |
| void | onStart (const IMC::Land *maneuver) |
| void | onPathControlState (const IMC::PathControlState *pcs) |
| void | onVehicleMedium (const IMC::VehicleMedium *msg) |
| void | sendTouchdown (double lat, double lon, double z) |
| ~Land (void) | |
 Public Member Functions inherited from Maneuver::Multiplexer::MuxedManeuver< IMC::Land, void > Public Member Functions inherited from Maneuver::Multiplexer::MuxedManeuver< IMC::Land, void > | |
| MuxedManeuver (Maneuvers::Maneuver *task, void *args) | |
| MuxedManeuver (Maneuvers::Maneuver *task) | |
| virtual | ~MuxedManeuver (void) |
| void | start (const IMC::Maneuver *maneuver) |
| Public Member Functions inherited from Maneuver::Multiplexer::AbstractMux | |
| AbstractMux (Maneuvers::Maneuver *task) | |
| virtual | ~AbstractMux (void) |
| virtual void | onBrake (const IMC::Brake *msg) |
| virtual void | onEstimatedState (const IMC::EstimatedState *msg) |
| virtual void | onStateReport (void) |
| virtual void | onThrottle (const IMC::Throttle *msg) |
| virtual void | onGpsFix (const IMC::GpsFix *msg) |
Additional Inherited Members | |
| Protected Attributes inherited from Maneuver::Multiplexer::MuxedManeuver< IMC::Land, void > | |
| void * | m_args |
| Protected Attributes inherited from Maneuver::Multiplexer::AbstractMux | |
| Maneuvers::Maneuver * | m_task |
|
inline |
Default constructor.
| [in] | task | pointer to Maneuver task |
|
inline |
|
inlinevirtual |
On PathControlState message.
| [in] | pcs | pointer to PathControlState message |
Reimplemented from Maneuver::Multiplexer::AbstractMux.
References Maneuver::Multiplexer::AbstractMux::m_task, and sendTouchdown().
|
inlinevirtual |
Start maneuver function.
| [in] | maneuver | goto maneuver message |
Implements Maneuver::Multiplexer::MuxedManeuver< IMC::Land, void >.
References Maneuver::Multiplexer::AbstractMux::m_task.
|
inlinevirtual |
On message VehicleMedium.
| [in] | msg | pointer to VehicleMedium message |
Reimplemented from Maneuver::Multiplexer::AbstractMux.
References Maneuver::Multiplexer::AbstractMux::m_task.
|
inline |
Send touchdown DesiredPath.
| [in] | lat | latitude |
| [in] | lon | longitude |
References Maneuver::Multiplexer::AbstractMux::m_task.
Referenced by onPathControlState().
 1.8.6
1.8.6