 |
DUNE: Uniform Navigational Environment
2024.09.0
|
|
DUNE: Uniform Navigational Environment
2024.09.0
|
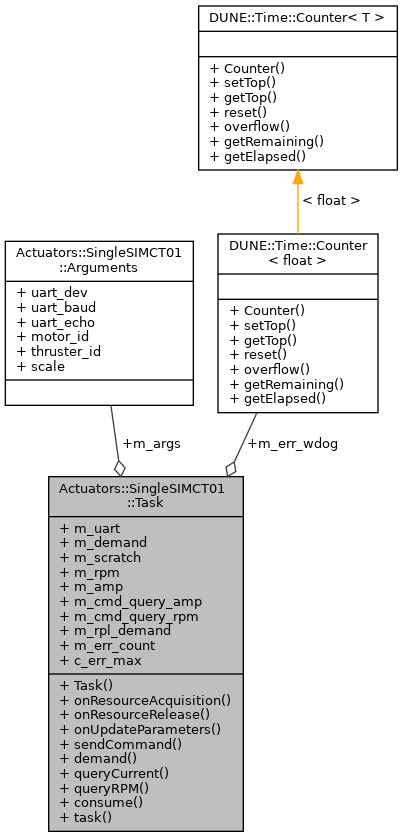
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onResourceAcquisition (void) |
| void | onResourceRelease (void) |
| void | onUpdateParameters (void) |
| bool | sendCommand (const char *cmd, char *bfr, unsigned bfr_len) |
| void | demand (void) |
| void | queryCurrent (void) |
| void | queryRPM (void) |
| void | consume (const IMC::SetThrusterActuation *msg) |
| void | task (void) |
Public Attributes | |
| SerialPort * | m_uart |
| int8_t | m_demand |
| char | m_scratch [15] |
| IMC::Rpm | m_rpm |
| IMC::Current | m_amp |
| std::string | m_cmd_query_amp |
| std::string | m_cmd_query_rpm |
| std::string | m_rpl_demand |
| unsigned | m_err_count |
| Counter< float > | m_err_wdog |
| Arguments | m_args |
Static Public Attributes | |
| static const unsigned | c_err_max |
|
inline |
|
inline |
|
inline |
References Actuators::SingleSIMCT01::Arguments::motor_id.
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
References Actuators::SingleSIMCT01::Arguments::uart_echo.
|
inline |
|
static |
| IMC::Current Actuators::SingleSIMCT01::Task::m_amp |
| Arguments Actuators::SingleSIMCT01::Task::m_args |
| std::string Actuators::SingleSIMCT01::Task::m_cmd_query_amp |
| std::string Actuators::SingleSIMCT01::Task::m_cmd_query_rpm |
| int8_t Actuators::SingleSIMCT01::Task::m_demand |
| unsigned Actuators::SingleSIMCT01::Task::m_err_count |
| Counter<float> Actuators::SingleSIMCT01::Task::m_err_wdog |
| std::string Actuators::SingleSIMCT01::Task::m_rpl_demand |
| IMC::Rpm Actuators::SingleSIMCT01::Task::m_rpm |
| char Actuators::SingleSIMCT01::Task::m_scratch[15] |
| SerialPort* Actuators::SingleSIMCT01::Task::m_uart |
 1.8.13
1.8.13