 |
DUNE: Uniform Navigational Environment
2.5.0
|
|
DUNE: Uniform Navigational Environment
2.5.0
|
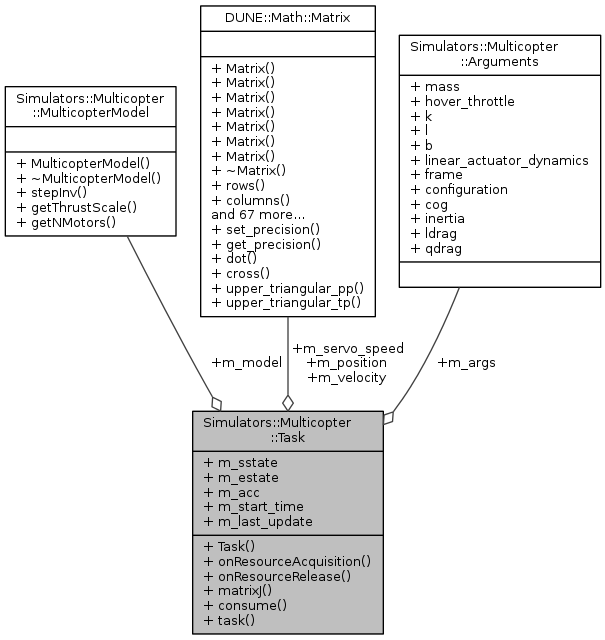
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onResourceAcquisition (void) |
| void | onResourceRelease (void) |
| Matrix | matrixJ (float roll, float pitch, float yaw) |
| void | consume (const IMC::SetPWM *msg) |
| void | task (void) |
Public Attributes | |
| MulticopterModel * | m_model |
| IMC::SimulatedState | m_sstate |
| IMC::EstimatedState | m_estate |
| IMC::Acceleration | m_acc |
| double | m_start_time |
| double | m_last_update |
| Matrix | m_servo_speed |
| Matrix | m_position |
| Matrix | m_velocity |
| Arguments | m_args |
|
inline |
Constructor.
| [in] | name | task name. |
| [in] | ctx | context. |
References Simulators::Multicopter::Arguments::b, Simulators::Multicopter::Arguments::cog, Simulators::Multicopter::Arguments::configuration, Simulators::Multicopter::Arguments::frame, Simulators::Multicopter::Arguments::hover_throttle, Simulators::Multicopter::Arguments::inertia, Simulators::Multicopter::Arguments::k, Simulators::Multicopter::Arguments::l, Simulators::Multicopter::Arguments::ldrag, Simulators::Multicopter::Arguments::linear_actuator_dynamics, m_args, m_sstate, Simulators::Multicopter::Arguments::mass, and Simulators::Multicopter::Arguments::qdrag.
|
inline |
References m_servo_speed.
|
inline |
References DUNE::Math::Matrix::horzCat(), DUNE::Math::transpose(), and DUNE::Math::Matrix::vertCat().
Referenced by task().
|
inline |
Acquire resources.
References Simulators::Multicopter::Arguments::b, Simulators::Multicopter::MulticopterModelParameters::b, Simulators::Multicopter::Arguments::cog, Simulators::Multicopter::MulticopterModelParameters::cog, Simulators::Multicopter::Arguments::configuration, Simulators::Multicopter::MulticopterModelParameters::configuration, Simulators::Multicopter::Configuration_plus, Simulators::Multicopter::Configuration_x, Simulators::Multicopter::Arguments::frame, Simulators::Multicopter::MulticopterModelParameters::frame, Simulators::Multicopter::Frame_hexa, Simulators::Multicopter::Frame_quad, Simulators::Multicopter::Arguments::hover_throttle, Simulators::Multicopter::MulticopterModelParameters::hover_throttle, Simulators::Multicopter::Arguments::inertia, Simulators::Multicopter::MulticopterModelParameters::inertia, Simulators::Multicopter::Arguments::k, Simulators::Multicopter::MulticopterModelParameters::k, Simulators::Multicopter::Arguments::l, Simulators::Multicopter::MulticopterModelParameters::l, Simulators::Multicopter::Arguments::ldrag, Simulators::Multicopter::MulticopterModelParameters::ldrag, Simulators::Multicopter::Arguments::linear_actuator_dynamics, Simulators::Multicopter::MulticopterModelParameters::linear_actuator_dynamics, m_args, m_model, Simulators::Multicopter::Arguments::mass, Simulators::Multicopter::MulticopterModelParameters::mass, Simulators::Multicopter::MulticopterModel, Simulators::Multicopter::Arguments::qdrag, and Simulators::Multicopter::MulticopterModelParameters::qdrag.
|
inline |
Release resources.
References m_model.
|
inline |
| IMC::Acceleration Simulators::Multicopter::Task::m_acc |
Accelleration.
Referenced by task().
| Arguments Simulators::Multicopter::Task::m_args |
Task arguments.
Referenced by onResourceAcquisition(), and Task().
| IMC::EstimatedState Simulators::Multicopter::Task::m_estate |
| double Simulators::Multicopter::Task::m_last_update |
Last time update was ran.
Referenced by task().
| MulticopterModel* Simulators::Multicopter::Task::m_model |
Simulation vehicle.
Referenced by onResourceAcquisition(), onResourceRelease(), and task().
| Matrix Simulators::Multicopter::Task::m_servo_speed |
| IMC::SimulatedState Simulators::Multicopter::Task::m_sstate |
| double Simulators::Multicopter::Task::m_start_time |
Start time.
Referenced by task().
 1.8.6
1.8.6