 |
DUNE: Uniform Navigational Environment
2016.05.0
|
|
DUNE: Uniform Navigational Environment
2016.05.0
|
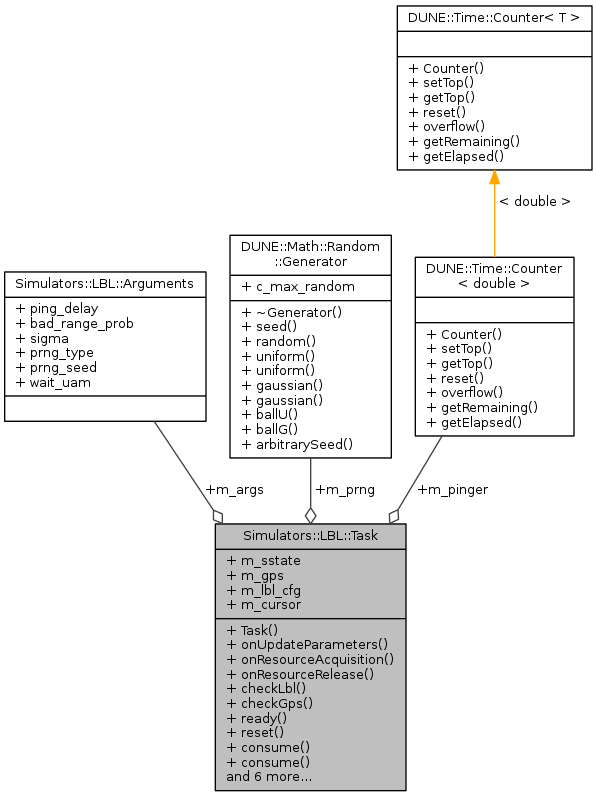
LBL simulator task.
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| void | onResourceAcquisition (void) |
| void | onResourceRelease (void) |
| bool | checkLbl (void) const |
| bool | checkGps (void) const |
| bool | ready (void) const |
| void | reset (void) |
| void | consume (const IMC::GpsFix *msg) |
| void | consume (const IMC::LblConfig *msg) |
| void | consume (const IMC::SimulatedState *msg) |
| void | consume (const IMC::UamTxFrame *msg) |
| void | onActivation (void) |
| void | onDeactivation (void) |
| void | range (const std::string &sys_name) |
| void | onMain (void) |
Public Attributes | |
| IMC::SimulatedState | m_sstate |
| IMC::GpsFix * | m_gps |
| IMC::LblConfig * | m_lbl_cfg |
| MessageList< IMC::LblBeacon > ::const_iterator | m_cursor |
| Counter< double > | m_pinger |
| Random::Generator * | m_prng |
| Arguments | m_args |
|
inline |
|
inline |
|
inline |
|
inline |
References checkLbl(), m_gps, and reset().
|
inline |
References checkGps(), checkLbl(), m_lbl_cfg, and reset().
|
inline |
|
inline |
References m_args, range(), and Simulators::LBL::Arguments::wait_uam.
|
inline |
References m_pinger, and DUNE::Time::Counter< T >::reset().
|
inline |
|
inline |
|
inline |
Acquire resources.
References m_args, m_prng, Simulators::LBL::Arguments::prng_seed, and Simulators::LBL::Arguments::prng_type.
|
inline |
|
inline |
Update parameters.
References m_args, m_pinger, Simulators::LBL::Arguments::ping_delay, and DUNE::Time::Counter< T >::setTop().
|
inline |
Range system.
| [in] | sys_name | system name. |
References Simulators::LBL::Arguments::bad_range_prob, checkLbl(), DUNE::Math::Random::Generator::gaussian(), m_args, m_lbl_cfg, m_prng, m_sstate, DUNE::Math::Random::Generator::random(), Simulators::LBL::Arguments::sigma, and Simulators::LBL::Arguments::wait_uam.
|
inline |
Check if we are ready to simulate LBL.
References checkGps(), checkLbl(), and m_lbl_cfg.
|
inline |
Reset ranger.
References m_cursor, m_lbl_cfg, m_pinger, and DUNE::Time::Counter< T >::reset().
Referenced by consume().
| Arguments Simulators::LBL::Task::m_args |
Task arguments.
Referenced by consume(), onMain(), onResourceAcquisition(), onUpdateParameters(), range(), and Task().
| MessageList<IMC::LblBeacon>::const_iterator Simulators::LBL::Task::m_cursor |
| IMC::GpsFix* Simulators::LBL::Task::m_gps |
WGS84 origin.
Referenced by checkGps(), consume(), and onResourceRelease().
| IMC::LblConfig* Simulators::LBL::Task::m_lbl_cfg |
LblConfig buffer.
Referenced by checkLbl(), consume(), onMain(), onResourceRelease(), range(), ready(), and reset().
| Counter<double> Simulators::LBL::Task::m_pinger |
Next ping time.
Referenced by onActivation(), onMain(), onUpdateParameters(), and reset().
| Random::Generator* Simulators::LBL::Task::m_prng |
PRNG handle.
Referenced by onResourceAcquisition(), onResourceRelease(), and range().
| IMC::SimulatedState Simulators::LBL::Task::m_sstate |
 1.8.6
1.8.6