 |
DUNE: Uniform Navigational Environment
2016.05.0
|
|
DUNE: Uniform Navigational Environment
2016.05.0
|
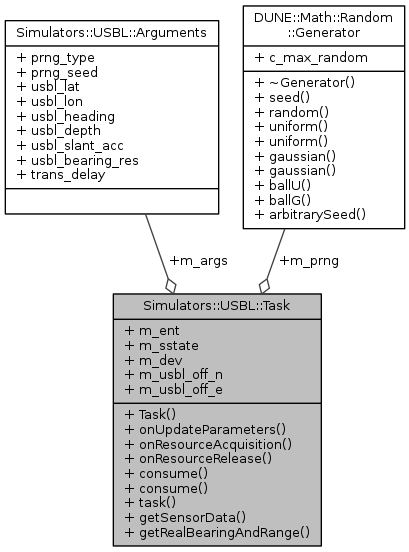
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| void | onResourceAcquisition (void) |
| void | onResourceRelease (void) |
| void | consume (const IMC::GpsFix *msg) |
| void | consume (const IMC::SimulatedState *msg) |
| void | task (void) |
| void | getSensorData (USBLMessage *msg) const |
| void | getRealBearingAndRange (double *bearing, double *range) const |
Public Attributes | |
| IMC::EntityState | m_ent |
| IMC::SimulatedState | m_sstate |
| IMC::DevDataBinary | m_dev |
| Random::Generator * | m_prng |
| double | m_usbl_off_n |
| double | m_usbl_off_e |
| Arguments | m_args |
|
inline |
References m_args, Simulators::USBL::Arguments::prng_seed, Simulators::USBL::Arguments::prng_type, Simulators::USBL::Arguments::trans_delay, Simulators::USBL::Arguments::usbl_bearing_res, Simulators::USBL::Arguments::usbl_depth, Simulators::USBL::Arguments::usbl_heading, Simulators::USBL::Arguments::usbl_lat, Simulators::USBL::Arguments::usbl_lon, and Simulators::USBL::Arguments::usbl_slant_acc.
|
inline |
|
inline |
|
inline |
Compute actual bearing angle and range from USBL transducer to vehicle.
References m_args, m_sstate, m_usbl_off_e, m_usbl_off_n, and Simulators::USBL::Arguments::usbl_heading.
Referenced by getSensorData().
|
inline |
Compute simulated sensor data using data from manufacturer.
References Simulators::USBL::USBLMessage::bearing, Simulators::USBL::USBLMessage::elevation, DUNE::Math::Random::Generator::gaussian(), getRealBearingAndRange(), m_args, m_prng, m_sstate, DUNE::Math::norm(), Simulators::USBL::USBLMessage::range, Simulators::USBL::Arguments::usbl_bearing_res, Simulators::USBL::Arguments::usbl_depth, Simulators::USBL::Arguments::usbl_heading, and Simulators::USBL::Arguments::usbl_slant_acc.
Referenced by task().
|
inline |
References m_args, m_prng, Simulators::USBL::Arguments::prng_seed, and Simulators::USBL::Arguments::prng_type.
|
inline |
References m_prng.
|
inline |
|
inline |
References getSensorData(), m_dev, and m_ent.
| Arguments Simulators::USBL::Task::m_args |
Referenced by consume(), getRealBearingAndRange(), getSensorData(), onResourceAcquisition(), onUpdateParameters(), and Task().
| IMC::DevDataBinary Simulators::USBL::Task::m_dev |
| IMC::EntityState Simulators::USBL::Task::m_ent |
Entity state message.
Referenced by task().
| Random::Generator* Simulators::USBL::Task::m_prng |
PRNG handle.
Referenced by getSensorData(), onResourceAcquisition(), and onResourceRelease().
| IMC::SimulatedState Simulators::USBL::Task::m_sstate |
Current position.
Referenced by consume(), getRealBearingAndRange(), and getSensorData().
| double Simulators::USBL::Task::m_usbl_off_e |
East offset of the USBL acoustic transducer.
Referenced by consume(), and getRealBearingAndRange().
| double Simulators::USBL::Task::m_usbl_off_n |
North offset of the USBL acoustic transducer.
Referenced by consume(), and getRealBearingAndRange().
 1.8.6
1.8.6