 |
DUNE: Uniform Navigational Environment
2019.02.1
|
|
DUNE: Uniform Navigational Environment
2019.02.1
|
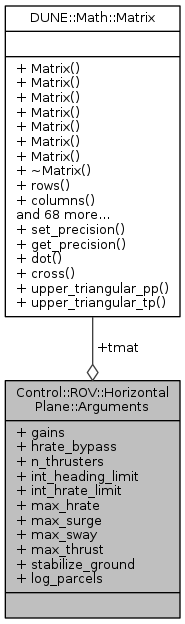
Task arguments.
Public Attributes | |
| std::vector< float > | gains [LP_MAX_LOOPS] |
| bool | hrate_bypass |
| unsigned | n_thrusters |
| float | int_heading_limit |
| float | int_hrate_limit |
| float | max_hrate |
| float | max_surge |
| float | max_sway |
| float | max_thrust |
| Matrix | tmat |
| bool | stabilize_ground |
| bool | log_parcels |
| std::vector<float> Control::ROV::HorizontalPlane::Arguments::gains[LP_MAX_LOOPS] |
| bool Control::ROV::HorizontalPlane::Arguments::hrate_bypass |
Referenced by Control::ROV::HorizontalPlane::Task::Task().
| float Control::ROV::HorizontalPlane::Arguments::int_heading_limit |
| float Control::ROV::HorizontalPlane::Arguments::int_hrate_limit |
| bool Control::ROV::HorizontalPlane::Arguments::log_parcels |
| float Control::ROV::HorizontalPlane::Arguments::max_hrate |
| float Control::ROV::HorizontalPlane::Arguments::max_surge |
Referenced by Control::ROV::HorizontalPlane::Task::Task().
| float Control::ROV::HorizontalPlane::Arguments::max_sway |
Referenced by Control::ROV::HorizontalPlane::Task::Task().
| float Control::ROV::HorizontalPlane::Arguments::max_thrust |
| unsigned Control::ROV::HorizontalPlane::Arguments::n_thrusters |
| bool Control::ROV::HorizontalPlane::Arguments::stabilize_ground |
| Matrix Control::ROV::HorizontalPlane::Arguments::tmat |
 1.8.11
1.8.11