 |
DUNE: Uniform Navigational Environment
2019.02.1
|
|
DUNE: Uniform Navigational Environment
2019.02.1
|
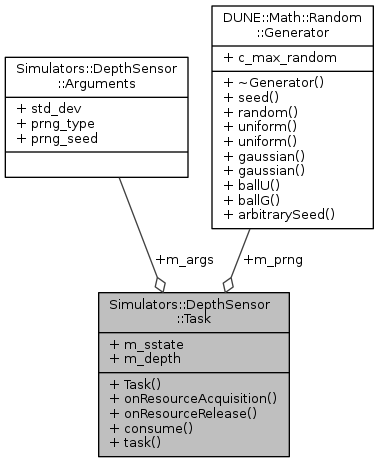
DepthSensor simulator task.
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onResourceAcquisition (void) |
| void | onResourceRelease (void) |
| void | consume (const IMC::SimulatedState *msg) |
| void | task (void) |
Public Attributes | |
| IMC::SimulatedState | m_sstate |
| IMC::Depth | m_depth |
| Random::Generator * | m_prng |
| Arguments | m_args |
|
inline |
|
inline |
Requests activation if not already active and updates m_sstate with the value of #msg.
|
inline |
Acquire resources. Initializes random number generator.
References Simulators::DepthSensor::Arguments::prng_seed, and Simulators::DepthSensor::Arguments::prng_type.
|
inline |
Release resources.
|
inline |
Dispatches a DUNE::IMC::Depth message with the depth stored in m_sstate plus some gaussian noise (according to parametrized standard deviation).
If task is not active, returns immediately.
References DUNE::Math::Random::Generator::gaussian(), and Simulators::DepthSensor::Arguments::std_dev.
| IMC::Depth Simulators::DepthSensor::Task::m_depth |
Current depth.
| Random::Generator* Simulators::DepthSensor::Task::m_prng |
PRNG handle.
| IMC::SimulatedState Simulators::DepthSensor::Task::m_sstate |
Last received simulated state.
 1.8.11
1.8.11