 |
DUNE: Uniform Navigational Environment
2024.09.0
|
|
DUNE: Uniform Navigational Environment
2024.09.0
|
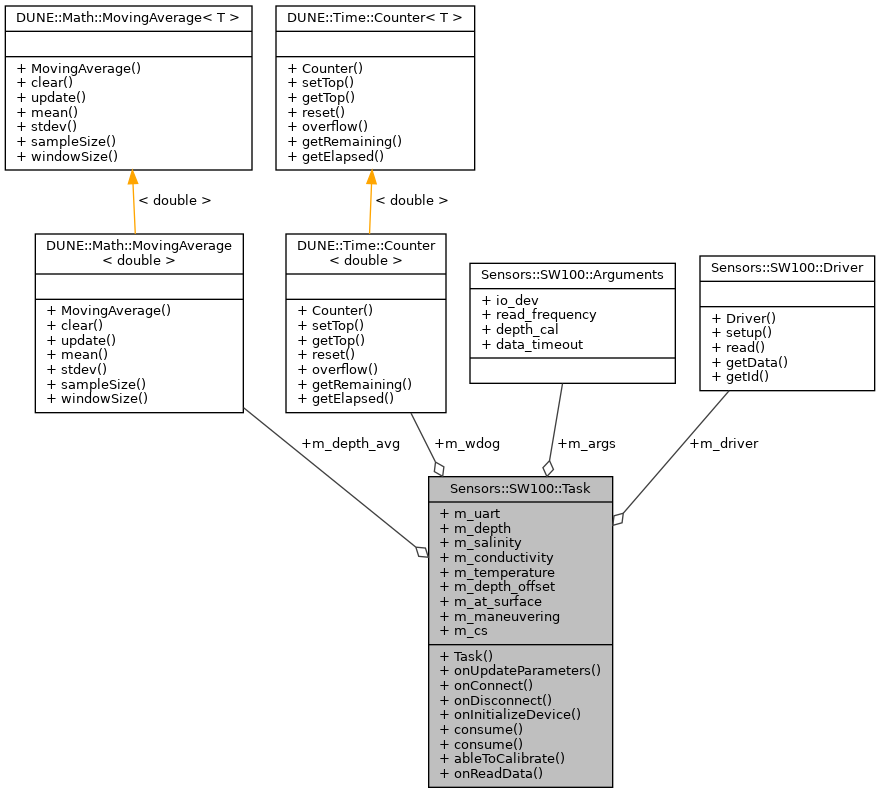
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onUpdateParameters (void) |
| bool | onConnect () override |
| void | onDisconnect () override |
| void | onInitializeDevice () override |
| void | consume (const IMC::VehicleMedium *msg) |
| void | consume (const IMC::VehicleState *msg) |
| bool | ableToCalibrate (void) |
| bool | onReadData () override |
Public Attributes | |
| Driver * | m_driver |
| SerialPort * | m_uart |
| IMC::Depth | m_depth |
| IMC::Salinity | m_salinity |
| IMC::Conductivity | m_conductivity |
| IMC::Temperature | m_temperature |
| IMC::DepthOffset | m_depth_offset |
| MovingAverage< double > | m_depth_avg |
| bool | m_at_surface |
| bool | m_maneuvering |
| CalibrationState | m_cs |
| Arguments | m_args |
| Counter< double > | m_wdog |
|
inline |
|
inline |
|
inline |
|
inline |
|
inlineoverride |
Try to connect to the device.
References Sensors::SW100::Arguments::io_dev.
|
inlineoverride |
Disconnect from device.
|
inlineoverride |
Device may be initialized.
References Sensors::SW100::Arguments::data_timeout.
|
inlineoverride |
Get data from device.
References DUNE::Math::MovingAverage< T >::clear(), Sensors::SW100::CS_ABLE, Sensors::SW100::CS_UNABLE, Sensors::SW100::Arguments::depth_cal, Sensors::SW100::Driver::getData(), Sensors::SW100::Driver::read(), Sensors::SW100::Driver::setup(), and DUNE::Math::MovingAverage< T >::update().
|
inline |
References Sensors::SW100::Arguments::read_frequency.
| bool Sensors::SW100::Task::m_at_surface |
Vehicle is at the surface.
| IMC::Conductivity Sensors::SW100::Task::m_conductivity |
Measured conductivity.
| CalibrationState Sensors::SW100::Task::m_cs |
Calibration state.
| IMC::Depth Sensors::SW100::Task::m_depth |
Measured depth.
| MovingAverage<double> Sensors::SW100::Task::m_depth_avg |
Moving average to compute depth offset.
| IMC::DepthOffset Sensors::SW100::Task::m_depth_offset |
Depth Offset.
| Driver* Sensors::SW100::Task::m_driver |
Device driver.
| bool Sensors::SW100::Task::m_maneuvering |
Vehicle is maneuvering.
| IMC::Salinity Sensors::SW100::Task::m_salinity |
Measured salinity.
| IMC::Temperature Sensors::SW100::Task::m_temperature |
Measured temperature.
| SerialPort* Sensors::SW100::Task::m_uart |
Serial port.
| Counter<double> Sensors::SW100::Task::m_wdog |
Watchdog.
 1.8.13
1.8.13