 |
DUNE: Uniform Navigational Environment
2019.02.1
|
|
DUNE: Uniform Navigational Environment
2019.02.1
|
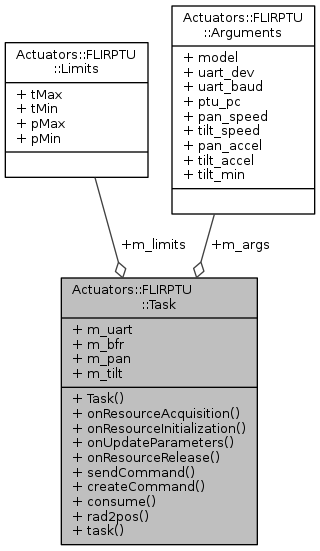
Public Member Functions | |
| Task (const std::string &name, Tasks::Context &ctx) | |
| void | onResourceAcquisition (void) |
| void | onResourceInitialization (void) |
| void | onUpdateParameters (void) |
| void | onResourceRelease (void) |
| void | sendCommand (const std::string &cmd) |
| void | createCommand (const std::string &cmd_type, int &val) |
| void | consume (const IMC::SetControlSurfaceDeflection *csd) |
| int | rad2pos (float min_angle, float max_angle, int min_pos, int max_pos, float angle) |
| void | task (void) |
Public Attributes | |
| SerialPort * | m_uart |
| Limits | m_limits |
| Arguments | m_args |
| uint8_t | m_bfr [BUFFER_MAX] |
| float | m_pan |
| float | m_tilt |
|
inline |
References Actuators::FLIRPTU::Arguments::model, Actuators::FLIRPTU::Arguments::pan_accel, Actuators::FLIRPTU::Arguments::pan_speed, Actuators::FLIRPTU::Arguments::ptu_pc, Actuators::FLIRPTU::Arguments::tilt_accel, Actuators::FLIRPTU::Arguments::tilt_min, Actuators::FLIRPTU::Arguments::tilt_speed, Actuators::FLIRPTU::Arguments::uart_baud, and Actuators::FLIRPTU::Arguments::uart_dev.
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
|
inline |
References DUNE::Math::trimValue().
|
inline |
|
inline |
| Arguments Actuators::FLIRPTU::Task::m_args |
| uint8_t Actuators::FLIRPTU::Task::m_bfr[BUFFER_MAX] |
| Limits Actuators::FLIRPTU::Task::m_limits |
| float Actuators::FLIRPTU::Task::m_pan |
| float Actuators::FLIRPTU::Task::m_tilt |
| SerialPort* Actuators::FLIRPTU::Task::m_uart |
 1.8.11
1.8.11