 |
DUNE: Uniform Navigational Environment
2019.02.1
|
|
DUNE: Uniform Navigational Environment
2019.02.1
|
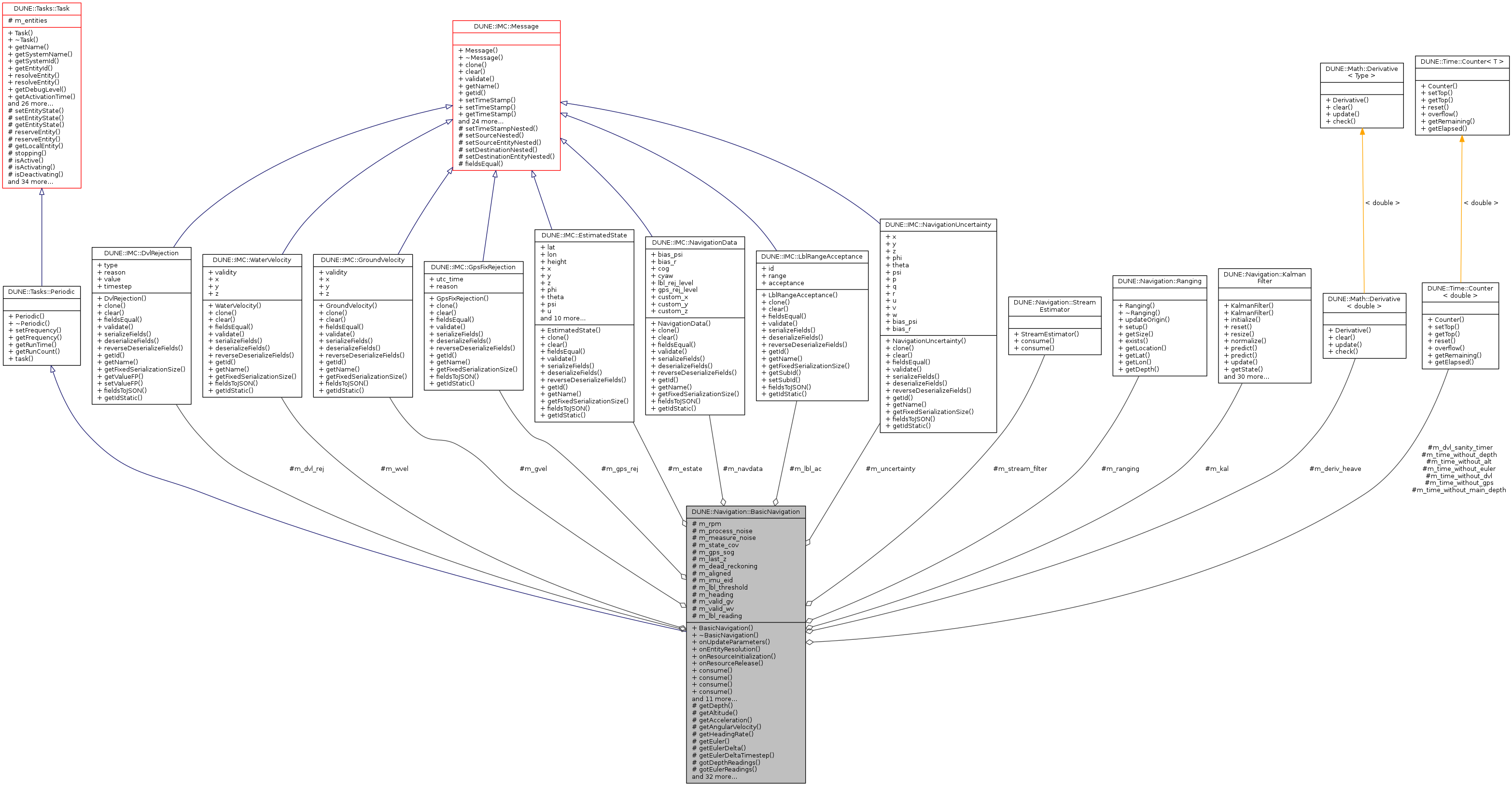
Abstract base class for navigation tasks.
This task is responsible to gather data from sensors and compute an estimate of the position of the system.
The navigation filter uses sensor data from GPS, LBL, DVL, AHRS, IMU and Pressure sensor. The state of the system is computed by means of an extended Kalman Filter algorithm. The estimated state is stored in the EstimatedState IMC message. The filter estimates, when possible, the outside stream velocity and stores it in a EstimatedStreamVelocity IMC message. Some of the state covariance parameters are stored inside NavigationUncertainty IMC message.
Some pre-filtering is done by rejecting GPS fixes and LBL ranges as well as applying a moving average filter to the altitude DVL measurements.
Public Member Functions | |
| BasicNavigation (const std::string &name, Tasks::Context &ctx) | |
| virtual | ~BasicNavigation (void) |
| virtual void | onUpdateParameters (void) |
| virtual void | onEntityResolution (void) |
| virtual void | onResourceInitialization (void) |
| virtual void | onResourceRelease (void) |
| void | consume (const IMC::Acceleration *msg) |
| void | consume (const IMC::AngularVelocity *msg) |
| void | consume (const IMC::DataSanity *msg) |
| void | consume (const IMC::Distance *msg) |
| void | consume (const IMC::Depth *msg) |
| void | consume (const IMC::DepthOffset *msg) |
| void | consume (const IMC::EulerAngles *msg) |
| void | consume (const IMC::EulerAnglesDelta *msg) |
| void | consume (const IMC::GpsFix *msg) |
| void | consume (const IMC::GroundVelocity *msg) |
| void | consume (const IMC::LblConfig *msg) |
| void | consume (const IMC::LblRange *msg) |
| void | consume (const IMC::Rpm *msg) |
| void | consume (const IMC::UsblFixExtended *msg) |
| void | consume (const IMC::WaterVelocity *msg) |
 Public Member Functions inherited from DUNE::Tasks::Periodic Public Member Functions inherited from DUNE::Tasks::Periodic | |
| Periodic (const std::string &name, Context &ctx) | |
| virtual | ~Periodic (void) |
| void | setFrequency (double freq) |
| double | getFrequency (void) const |
| double | getRunTime (void) const |
| unsigned | getRunCount (void) const |
| virtual void | task (void)=0 |
| Public Member Functions inherited from DUNE::Tasks::Task | |
| Task (const std::string &name, Context &context) | |
| virtual | ~Task (void) |
| const char * | getName (void) const |
| const char * | getSystemName (void) const |
| unsigned int | getSystemId (void) const |
| unsigned int | getEntityId (void) const |
| unsigned int | resolveEntity (const std::string &label) const |
| std::string | resolveEntity (unsigned int id) const |
| DebugLevel | getDebugLevel (void) const |
| uint16_t | getActivationTime (void) const |
| uint16_t | getDeactivationTime (void) const |
| unsigned int | resolveSystemName (const std::string &name) const |
| const char * | resolveSystemId (unsigned int id) const |
| void | loadConfig (void) |
| void | setPriority (unsigned int value) |
| unsigned int | getPriority (void) const |
| void | inf (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void | war (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void | err (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void | cri (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void | debug (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void | trace (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void | spew (const char *format,...) DUNE_PRINTF_FORMAT(2 |
| void void void void void void void void | dispatch (IMC::Message *msg, unsigned int flags=0) |
| void | dispatch (IMC::Message &msg, unsigned int flags=0) |
| void | dispatchReply (const IMC::Message &original, IMC::Message &msg, unsigned int flags=0) |
| void | receive (const IMC::Message *msg) |
| void | reserveEntities (void) |
| void | resolveEntities (void) |
| void | acquireResources (void) |
| void | releaseResources (void) |
| void | initializeResources (void) |
| void | updateParameters (bool act_deact=true) |
| void | writeParamsXML (std::ostream &os) const |
| const char * | getEntityLabel (void) const |
| void | setEntityLabel (const std::string &label) |
| Public Member Functions inherited from DUNE::Tasks::AbstractTask | |
| AbstractTask (void) | |
| virtual | ~AbstractTask (void) |
| Public Member Functions inherited from DUNE::Concurrency::Thread | |
| Thread (void) | |
| virtual | ~Thread (void) |
| int | getProcessorUsage (void) |
| Public Member Functions inherited from DUNE::Concurrency::Runnable | |
| Runnable (void) | |
| virtual | ~Runnable (void) |
| void | start (void) |
| void | stop (void) |
| void | join (void) |
| void | stopAndJoin (void) |
| void | setPriority (Scheduler::Policy policy, unsigned priority) |
| unsigned | getPriority (void) |
| State | getState (void) |
| bool | isCreated (void) |
| bool | isStopping (void) |
| bool | isRunning (void) |
| bool | isStarting (void) |
| bool | isDead (void) |
Protected Member Functions | |
| double | getDepth (void) const |
| double | getAltitude (void) |
| double | getAcceleration (unsigned axis) const |
| double | getAngularVelocity (unsigned axis) const |
| double | getHeadingRate (void) |
| double | getEuler (unsigned axis) const |
| double | getEulerDelta (unsigned axis) const |
| float | getEulerDeltaTimestep (void) const |
| bool | gotDepthReadings (void) const |
| bool | gotEulerReadings (void) const |
| bool | gotAngularReadings (void) const |
| bool | gotAccelerationReadings (void) const |
| unsigned | getAhrsId (void) const |
| double | getLblRejectionValue (double exp_range) const |
| bool | rejectLbl (void) const |
| double | getTimeStep (void) |
| void | updateEuler (float filter) |
| void | updateEulerDelta (float filter) |
| void | updateAngularVelocities (float filter) |
| void | updateAcceleration (float filter) |
| void | updateDepth (float filter) |
| virtual void | reset (void) |
| virtual bool | setup (void) |
| virtual void | onConsumeLblConfig (void) |
| virtual void | updateKalmanGpsParameters (double hacc) |
| virtual void | runKalmanGPS (double x, double y) |
| virtual void | runKalmanLBL (int beacon, float range, double dx, double dy, double exp_range) |
| virtual void | runKalmanDVL (void) |
| virtual void | runKalmanUSBL (double x, double y) |
| virtual void | getSpeedOutputStates (unsigned *u, unsigned *v)=0 |
| virtual unsigned | getNumberOutputs (void)=0 |
| void | onDispatchNavigation (void) |
| bool | isActive (void) |
| void | reportToBus (void) |
| void | updateBuffers (float filter) |
| void | resetAcceleration (void) |
| void | resetAngularVelocity (void) |
| void | resetDepth (void) |
| void | resetEulerAngles (void) |
| void | resetEulerAnglesDelta (void) |
| void | checkUncertainty (bool abort=true) |
| void | checkDeclination (double lat, double lon, double height) |
| Protected Member Functions inherited from DUNE::Tasks::Task | |
| void | setEntityState (IMC::EntityState::StateEnum state, Status::Code code) |
| void | setEntityState (IMC::EntityState::StateEnum state, const std::string &description) |
| IMC::EntityState::StateEnum | getEntityState (void) const |
| unsigned int | reserveEntity (const std::string &label) |
| template<typename E > | |
| E * | reserveEntity (const std::string &label) |
| Entities::BasicEntity * | getLocalEntity (const std::string &label) |
| bool | stopping (void) |
| bool | isActive (void) const |
| bool | isActivating (void) const |
| bool | isDeactivating (void) const |
| void | waitForMessages (double timeout) |
| void | consumeMessages (void) |
| template<typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename Y , typename T > | |
| Parameter & | param (const std::string &name, T &var) |
| template<typename T > | |
| bool | paramChanged (T &var) |
| void | paramActive (Parameter::Scope def_scope, Parameter::Visibility def_visibility, bool def_value=false) |
| void | setParamSectionEditor (const std::string &name) |
| template<typename M , typename T > | |
| void | bind (T *task_obj, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list) |
| template<typename T , typename M > | |
| void | bind (T *task_obj, const std::vector< uint32_t > &list, void(T::*consumer)(const M *)=&T::consume) |
| template<typename T > | |
| void | bind (T *task_obj, const std::vector< std::string > &list) |
| void | requestActivation (void) |
| void | requestDeactivation (void) |
| void | activate (void) |
| void | activationFailed (const std::string &reason) |
| void | deactivate (void) |
| void | deactivationFailed (const std::string &reason) |
| virtual bool | onWriteParamsXML (std::ostream &os) const |
| virtual void | onEntityReservation (void) |
| virtual void | onReportEntityState (void) |
| virtual void | onResourceAcquisition (void) |
| virtual void | onRequestActivation (void) |
| virtual void | onRequestDeactivation (void) |
| virtual void | onActivation (void) |
| virtual void | onDeactivation (void) |
| virtual void | onQueryEntityParameters (const IMC::QueryEntityParameters *msg) |
| virtual void | onSetEntityParameters (const IMC::SetEntityParameters *msg) |
| virtual void | onPushEntityParameters (const IMC::PushEntityParameters *msg) |
| virtual void | onPopEntityParameters (const IMC::PopEntityParameters *msg) |
| Protected Member Functions inherited from DUNE::Concurrency::Thread | |
| void | startImpl (void) |
| void | stopImpl (void) |
| void | joinImpl (void) |
| void | setPriorityImpl (Scheduler::Policy policy, unsigned priority) |
| unsigned | getPriorityImpl (void) |
Additional Inherited Members | |
| Public Types inherited from DUNE::Concurrency::Runnable |
| DUNE::Navigation::BasicNavigation::BasicNavigation | ( | const std::string & | name, |
| Tasks::Context & | ctx | ||
| ) |
Constructor.
| [in] | name | name. |
| [in] | ctx | context. |
References DUNE::Tasks::Parameter::defaultValue(), DUNE::Tasks::Parameter::description(), DUNE::Tasks::Profiles::isSelected(), m_aligned, DUNE::Tasks::Task::m_ctx, m_dead_reckoning, m_lbl_reading, m_lbl_threshold, m_rpm, DUNE::Tasks::Task::param(), DUNE::Tasks::Context::profiles, DUNE::Tasks::Parameter::units(), DUNE::IMC::GroundVelocity::VAL_VEL_X, DUNE::IMC::WaterVelocity::VAL_VEL_X, DUNE::IMC::GroundVelocity::VAL_VEL_Y, DUNE::IMC::WaterVelocity::VAL_VEL_Y, DUNE::IMC::GroundVelocity::VAL_VEL_Z, DUNE::IMC::WaterVelocity::VAL_VEL_Z, DUNE::Tasks::Parameter::visibility(), and DUNE::Tasks::Parameter::VISIBILITY_USER.
|
virtual |
Destructor.
|
protected |
Routine to check current declination value using WMM.
| [in] | lat | vehicle current latitude. |
| [in] | lon | vehicle current longitude. |
| [in] | height | vehicle current height. |
References DUNE::Navigation::AXIS_X, DUNE::Navigation::AXIS_Y, DUNE::Navigation::AXIS_Z, DUNE::Coordinates::WMM::declination(), DUNE::Tasks::Context::dir_cfg, getEuler(), DUNE::Tasks::Task::m_ctx, DUNE::Math::Angles::normalizeRadian(), and DUNE::Math::Matrix::toDCM().
Referenced by consume(), and updateDepth().
|
protected |
Routine to check navigation uncertainty.
| [in] | abort | abort if position uncertainty is exceeded. |
References DUNE::Status::CODE_ACTIVE, DUNE::Status::CODE_ALIGNED, DUNE::Status::CODE_NOT_ALIGNED, DUNE::IMC::EntityState::ESTA_ERROR, DUNE::IMC::EntityState::ESTA_NORMAL, DUNE::Navigation::KalmanFilter::getCovariance(), m_aligned, m_dead_reckoning, m_kal, m_time_without_depth, m_time_without_euler, DUNE::Time::Counter< T >::overflow(), DUNE::Tasks::Task::setEntityState(), DUNE::Navigation::SM_STATE_BOOT, DUNE::Navigation::SM_STATE_NORMAL, DUNE::Navigation::SM_STATE_UNSAFE, DUNE::Tasks::Task::spew(), DUNE::Navigation::STATE_X, DUNE::Navigation::STATE_Y, and DUNE::Utils::String::str().
Referenced by Navigation::General::ROV::Task::task(), and updateDepth().
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::Acceleration * | msg | ) |
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::AngularVelocity * | msg | ) |
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::DataSanity * | msg | ) |
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::Distance * | msg | ) |
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::Depth * | msg | ) |
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::DepthOffset * | msg | ) |
References DUNE::IMC::Message::getSourceEntity(), and DUNE::IMC::DepthOffset::value.
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::EulerAngles * | msg | ) |
References DUNE::Navigation::AXIS_X, DUNE::Navigation::AXIS_Y, DUNE::Navigation::AXIS_Z, getEuler(), DUNE::IMC::Message::getSourceEntity(), m_time_without_euler, DUNE::Math::Angles::minSignedAngle(), DUNE::IMC::EulerAngles::phi, DUNE::IMC::EulerAngles::psi, DUNE::Time::Counter< T >::reset(), DUNE::IMC::EulerAngles::theta, and DUNE::Tasks::Task::war().
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::EulerAnglesDelta * | msg | ) |
References DUNE::Navigation::AXIS_X, DUNE::Navigation::AXIS_Y, DUNE::Navigation::AXIS_Z, DUNE::IMC::Message::getSourceEntity(), m_imu_eid, DUNE::IMC::EulerAnglesDelta::timestep, DUNE::Tasks::Task::war(), DUNE::IMC::EulerAnglesDelta::x, DUNE::IMC::EulerAnglesDelta::y, and DUNE::IMC::EulerAnglesDelta::z.
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::GpsFix * | msg | ) |
References DUNE::Navigation::AXIS_X, checkDeclination(), DUNE::Navigation::StreamEstimator::consume(), DUNE::IMC::CacheControl::COP_STORE, DUNE::Tasks::Task::dispatch(), DUNE::Coordinates::WGS84::displacement(), getEuler(), DUNE::IMC::Message::getTimeStamp(), DUNE::IMC::GpsFix::GFT_MANUAL_INPUT, DUNE::IMC::GpsFix::GFV_VALID_HACC, DUNE::IMC::GpsFix::GFV_VALID_POS, DUNE::IMC::GpsFix::GFV_VALID_SOG, DUNE::IMC::GpsFix::hacc, DUNE::IMC::GpsFix::hdop, DUNE::IMC::GpsFix::height, DUNE::IMC::EstimatedState::height, DUNE::IMC::GpsFix::lat, DUNE::IMC::EstimatedState::lat, DUNE::IMC::GpsFix::lon, DUNE::IMC::EstimatedState::lon, m_estate, m_gps_rej, m_gps_sog, m_kal, m_last_z, m_ranging, m_stream_filter, DUNE::Math::MovingAverage< T >::mean(), DUNE::IMC::CacheControl::message, DUNE::Math::norm(), DUNE::IMC::CacheControl::op, DUNE::IMC::GpsFixRejection::reason, DUNE::Memory::replace(), DUNE::IMC::GpsFixRejection::RR_ABOVE_MAX_HACC, DUNE::IMC::GpsFixRejection::RR_ABOVE_MAX_HDOP, DUNE::IMC::GpsFixRejection::RR_ABOVE_THRESHOLD, DUNE::IMC::GpsFixRejection::RR_INVALID, runKalmanGPS(), DUNE::Math::MovingAverage< T >::sampleSize(), DUNE::Navigation::KalmanFilter::setState(), DUNE::IMC::Message::setTimeStamp(), DUNE::IMC::GpsFix::sog, DUNE::Tasks::Task::spew(), DUNE::Navigation::STATE_X, DUNE::Navigation::STATE_Y, DUNE::IMC::GpsFix::type, DUNE::Math::MovingAverage< T >::update(), updateKalmanGpsParameters(), DUNE::Navigation::Ranging::updateOrigin(), DUNE::IMC::GpsFix::utc_time, DUNE::IMC::GpsFixRejection::utc_time, and DUNE::IMC::GpsFix::validity.
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::GroundVelocity * | msg | ) |
References DUNE::Navigation::AXIS_Z, DUNE::Tasks::Task::dispatch(), getAngularVelocity(), DUNE::Time::Delta::getDelta(), DUNE::IMC::Message::getTimeStamp(), m_dvl_rej, m_gvel, m_time_without_dvl, m_valid_gv, DUNE::IMC::DvlRejection::reason, DUNE::Time::Counter< T >::reset(), DUNE::IMC::DvlRejection::RR_ABS_THRESHOLD_X, DUNE::IMC::DvlRejection::RR_ABS_THRESHOLD_Y, DUNE::IMC::DvlRejection::RR_INNOV_THRESHOLD_X, DUNE::IMC::DvlRejection::RR_INNOV_THRESHOLD_Y, DUNE::IMC::Message::setTimeStamp(), DUNE::IMC::DvlRejection::timestep, DUNE::IMC::DvlRejection::type, DUNE::IMC::DvlRejection::TYPE_GV, DUNE::IMC::GroundVelocity::validity, DUNE::IMC::DvlRejection::value, DUNE::IMC::GroundVelocity::x, and DUNE::IMC::GroundVelocity::y.
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::LblConfig * | msg | ) |
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::LblRange * | msg | ) |
References DUNE::IMC::LblRangeAcceptance::acceptance, DUNE::Navigation::AXIS_Z, DUNE::Tasks::Task::dispatch(), DUNE::Navigation::Ranging::exists(), getDepth(), getEuler(), DUNE::Navigation::Ranging::getLocation(), DUNE::Navigation::Ranging::getSize(), DUNE::Navigation::KalmanFilter::getState(), DUNE::IMC::Message::getTimeStamp(), DUNE::IMC::LblRange::id, DUNE::IMC::LblRangeAcceptance::id, m_kal, m_lbl_ac, m_ranging, m_time_without_gps, DUNE::Time::Counter< T >::overflow(), DUNE::IMC::LblRange::range, DUNE::IMC::LblRangeAcceptance::range, rejectLbl(), DUNE::IMC::LblRangeAcceptance::RR_AT_SURFACE, DUNE::IMC::LblRangeAcceptance::RR_NO_INFO, runKalmanLBL(), DUNE::IMC::Message::setTimeStamp(), DUNE::Navigation::STATE_X, and DUNE::Navigation::STATE_Y.
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::Rpm * | msg | ) |
References DUNE::Navigation::StreamEstimator::consume(), m_rpm, m_stream_filter, and DUNE::IMC::Rpm::value.
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::UsblFixExtended * | msg | ) |
| void DUNE::Navigation::BasicNavigation::consume | ( | const IMC::WaterVelocity * | msg | ) |
References DUNE::Navigation::AXIS_Z, DUNE::Status::CODE_WAIT_CONVERGE, DUNE::IMC::CacheControl::COP_STORE, DUNE::Tasks::Task::dispatch(), DUNE::IMC::EntityState::ESTA_BOOT, getAngularVelocity(), DUNE::Time::Delta::getDelta(), DUNE::IMC::Message::getTimeStamp(), m_dvl_rej, m_time_without_dvl, m_valid_wv, m_wvel, DUNE::IMC::CacheControl::message, DUNE::IMC::CacheControl::op, DUNE::IMC::DvlRejection::reason, DUNE::Memory::replace(), DUNE::Time::Counter< T >::reset(), DUNE::IMC::DvlRejection::RR_ABS_THRESHOLD_X, DUNE::IMC::DvlRejection::RR_ABS_THRESHOLD_Y, DUNE::IMC::DvlRejection::RR_INNOV_THRESHOLD_X, DUNE::IMC::DvlRejection::RR_INNOV_THRESHOLD_Y, DUNE::Tasks::Task::setEntityState(), DUNE::IMC::Message::setTimeStamp(), setup(), DUNE::Navigation::SM_STATE_BOOT, DUNE::IMC::DvlRejection::timestep, DUNE::IMC::DvlRejection::type, DUNE::IMC::DvlRejection::TYPE_WV, DUNE::IMC::WaterVelocity::validity, DUNE::IMC::DvlRejection::value, DUNE::IMC::WaterVelocity::x, and DUNE::IMC::WaterVelocity::y.
|
inlineprotected |
Get the acceleration along a specific axis.
Referenced by updateAcceleration().
|
inlineprotected |
Get AHRS Entity Id.
|
inlineprotected |
Get vehicle altitude.
Negative value denotes invalid estimate.
References m_dvl_sanity_timer, m_time_without_alt, and DUNE::Time::Counter< T >::overflow().
Referenced by isActive(), and onDispatchNavigation().
|
inlineprotected |
Get angular velocity value along a specific axis.
Referenced by consume(), getHeadingRate(), isActive(), Navigation::General::ROV::Task::logData(), onDispatchNavigation(), and updateAngularVelocities().
|
inlineprotected |
Get depth value.
Referenced by consume(), isActive(), onDispatchNavigation(), and updateDepth().
|
inlineprotected |
Get Euler Angle value.
Referenced by checkDeclination(), consume(), getHeadingRate(), isActive(), Navigation::General::ROV::Task::logData(), onDispatchNavigation(), Navigation::General::ROV::Task::setTransition(), and updateEuler().
|
inlineprotected |
Get Euler Angles increment value along a specific axis.
Referenced by getHeadingRate(), and updateEulerDelta().
|
inlineprotected |
Get Euler Angles increment value along a specific axis.
Referenced by getHeadingRate().
|
inlineprotected |
Get heading rate value.
References DUNE::Navigation::AXIS_X, DUNE::Navigation::AXIS_Y, DUNE::Navigation::AXIS_Z, getAngularVelocity(), getEuler(), getEulerDelta(), getEulerDeltaTimestep(), and m_dead_reckoning.
|
inlineprotected |
Routine to compute LBL rejection value.
| [in] | exp_range | expected LBL range value. |
Referenced by runKalmanLBL().
|
protectedpure virtual |
Get number of EKF outputs.
Implemented in Navigation::AUV::Navigation::Task, and Navigation::General::ROV::Task.
Referenced by runKalmanLBL(), and updateDepth().
|
protectedpure virtual |
Get EKF output matrix speed indexes.
| [out] | u | forward speed state index. |
| [out] | v | transversal speed state index. |
Implemented in Navigation::AUV::Navigation::Task, and Navigation::General::ROV::Task.
Referenced by runKalmanDVL(), and updateDepth().
|
inlineprotected |
Routine to get navigation time step.
References DUNE::Time::Delta::getDelta().
Referenced by Navigation::General::ROV::Task::task().
|
inlineprotected |
Number of acceleration readings since last cycle plus constant filter gain.
|
inlineprotected |
Number of angular velocity readings since last cycle plus constant filter gain.
Referenced by isActive().
|
inlineprotected |
Number of depth readings since last cycle plus constant filter gain.
|
inlineprotected |
Number of euler angles readings since last cycle plus constant filter gain.
Referenced by isActive().
|
protected |
Routine to check if navigation task is active.
References DUNE::IMC::EstimatedState::alt, DUNE::Navigation::AXIS_X, DUNE::Navigation::AXIS_Y, DUNE::Navigation::AXIS_Z, DUNE::IMC::EstimatedState::depth, DUNE::Tasks::Task::dispatch(), getAltitude(), getAngularVelocity(), getDepth(), getEuler(), gotAngularReadings(), gotEulerReadings(), DUNE::IMC::EstimatedState::height, DUNE::IMC::EstimatedState::lat, DUNE::IMC::EstimatedState::lon, m_estate, m_heading, DUNE::Math::Angles::normalizeRadian(), DUNE::IMC::EstimatedState::p, DUNE::IMC::EstimatedState::phi, DUNE::IMC::EstimatedState::psi, DUNE::IMC::EstimatedState::q, DUNE::IMC::EstimatedState::r, DUNE::IMC::EstimatedState::theta, updateAngularVelocities(), updateDepth(), and updateEuler().
Referenced by updateDepth().
|
protectedvirtual |
Method invoked when LblConfig message is received.
Reimplemented in Navigation::AUV::Navigation::Task, and Navigation::General::ROV::Task.
Referenced by consume(), and updateDepth().
|
protected |
Routine called to assign common dispatch messages.
References DUNE::IMC::EstimatedState::alt, DUNE::Navigation::AXIS_X, DUNE::Navigation::AXIS_Y, DUNE::IMC::NavigationData::cyaw, DUNE::IMC::EstimatedState::depth, getAltitude(), getAngularVelocity(), DUNE::Navigation::KalmanFilter::getCovariance(), getDepth(), getEuler(), DUNE::Navigation::KalmanFilter::getState(), m_deriv_heave, m_estate, m_heading, m_kal, m_last_z, m_navdata, m_uncertainty, DUNE::Math::Angles::normalizeRadian(), DUNE::IMC::EstimatedState::p, DUNE::IMC::EstimatedState::phi, DUNE::IMC::EstimatedState::psi, DUNE::IMC::EstimatedState::q, DUNE::Navigation::STATE_X, DUNE::Navigation::STATE_Y, DUNE::IMC::EstimatedState::theta, DUNE::Coordinates::BodyFixedFrame::toInertialFrame(), DUNE::IMC::EstimatedState::u, DUNE::Math::MovingAverage< T >::update(), DUNE::Math::Derivative< Type >::update(), DUNE::IMC::EstimatedState::v, DUNE::IMC::EstimatedState::vx, DUNE::IMC::EstimatedState::vy, DUNE::IMC::EstimatedState::vz, DUNE::IMC::EstimatedState::w, DUNE::IMC::EstimatedState::x, DUNE::IMC::NavigationUncertainty::x, DUNE::IMC::EstimatedState::y, DUNE::IMC::NavigationUncertainty::y, and DUNE::IMC::EstimatedState::z.
Referenced by Navigation::General::ROV::Task::logData(), and updateDepth().
|
virtual |
Resolve entities.
Reimplemented from DUNE::Tasks::Task.
Reimplemented in Navigation::AUV::Navigation::Task.
References DUNE::Tasks::Profiles::isSelected(), DUNE::Tasks::Task::m_ctx, DUNE::Tasks::Context::profiles, and DUNE::Tasks::Task::resolveEntity().
|
virtual |
Initialize resources.
Reimplemented from DUNE::Tasks::Task.
Reimplemented in Navigation::AUV::Navigation::Task, and Navigation::General::ROV::Task.
References reset().
|
virtual |
Release allocated resources.
Reimplemented from DUNE::Tasks::Task.
Reimplemented in Navigation::AUV::Navigation::Task, and Navigation::General::ROV::Task.
References DUNE::Memory::clear().
|
virtual |
Update internal parameters.
Reimplemented from DUNE::Tasks::Task.
Reimplemented in Navigation::AUV::Navigation::Task, and Navigation::General::ROV::Task.
References DUNE::Tasks::Profiles::isSelected(), DUNE::Tasks::Task::m_ctx, m_dvl_sanity_timer, m_time_without_alt, m_time_without_depth, m_time_without_dvl, m_time_without_euler, m_time_without_gps, m_time_without_main_depth, DUNE::Tasks::Context::profiles, and DUNE::Time::Counter< T >::setTop().
|
inlineprotected |
This function checks if navigation must reject all lbl.
Referenced by consume().
|
protected |
Routine to report navigation messages to the bus.
References DUNE::Tasks::Task::dispatch(), DUNE::Time::Clock::getSinceEpoch(), m_estate, m_navdata, m_uncertainty, and DUNE::IMC::Message::setTimeStamp().
Referenced by Navigation::General::ROV::Task::task(), and updateDepth().
|
protectedvirtual |
Routine to reset navigation.
Reimplemented in Navigation::AUV::Navigation::Task, and Navigation::General::ROV::Task.
References DUNE::Status::CODE_WAIT_GPS_FIX, DUNE::IMC::EntityState::ESTA_BOOT, m_gps_sog, m_heading, m_last_z, m_valid_gv, m_valid_wv, DUNE::Tasks::Task::setEntityState(), and DUNE::Navigation::SM_STATE_IDLE.
Referenced by onResourceInitialization(), setup(), and updateDepth().
|
protected |
Routine to reset acceleration buffers.
References DUNE::Navigation::AXIS_X, DUNE::Navigation::AXIS_Y, and DUNE::Navigation::AXIS_Z.
Referenced by resetEulerAnglesDelta(), and updateDepth().
|
protected |
Routine to reset angular velocity buffers.
References DUNE::Navigation::AXIS_X, DUNE::Navigation::AXIS_Y, and DUNE::Navigation::AXIS_Z.
Referenced by resetEulerAnglesDelta(), and updateDepth().
|
protected |
Routine to reset depth buffers.
Referenced by resetEulerAnglesDelta(), and updateDepth().
|
protected |
Routine to reset euler angles buffers.
References DUNE::Navigation::AXIS_X, DUNE::Navigation::AXIS_Y, and DUNE::Navigation::AXIS_Z.
Referenced by resetEulerAnglesDelta(), and updateDepth().
|
protected |
Routine to reset euler angles delta buffers.
References DUNE::Navigation::AXIS_X, DUNE::Navigation::AXIS_Y, DUNE::Navigation::AXIS_Z, resetAcceleration(), resetAngularVelocity(), resetDepth(), and resetEulerAngles().
Referenced by updateDepth().
|
protectedvirtual |
Routine to assign EKF filter output variables when a DVL velocity message is received.
References getSpeedOutputStates(), m_gvel, m_kal, m_valid_gv, m_valid_wv, m_wvel, DUNE::Navigation::KalmanFilter::setOutput(), DUNE::IMC::GroundVelocity::x, DUNE::IMC::WaterVelocity::x, DUNE::IMC::GroundVelocity::y, and DUNE::IMC::WaterVelocity::y.
Referenced by Navigation::General::ROV::Task::task(), and updateDepth().
|
protectedvirtual |
Routine to assign EKF filter output variables when a GpsFix message is received.
| [in] | x | vehicle north displacement (m). |
| [in] | y | vehicle east displacement (m). |
Reimplemented in Navigation::AUV::Navigation::Task, and Navigation::General::ROV::Task.
Referenced by consume(), and updateDepth().
|
protectedvirtual |
Routine to assign EKF filter output variables when a GpsFix message is received.
| [in] | beacon | beacon id. |
| [in] | range | range to beacon. |
| [in] | dx | distance along x-axis. |
| [in] | dy | distance along y-axis. |
| [in] | exp_range | expected range. |
References DUNE::IMC::LblRangeAcceptance::acceptance, DUNE::Tasks::Task::dispatch(), DUNE::Navigation::KalmanFilter::getCovariance(), getLblRejectionValue(), getNumberOutputs(), DUNE::IMC::NavigationData::lbl_rej_level, m_kal, m_lbl_ac, m_lbl_reading, m_lbl_threshold, m_navdata, DUNE::IMC::LblRangeAcceptance::RR_ABOVE_THRESHOLD, DUNE::IMC::LblRangeAcceptance::RR_ACCEPTED, DUNE::Navigation::KalmanFilter::setInnovation(), DUNE::Navigation::KalmanFilter::setObservation(), DUNE::Navigation::KalmanFilter::setOutput(), DUNE::Navigation::STATE_X, and DUNE::Navigation::STATE_Y.
Referenced by consume(), and updateDepth().
|
protectedvirtual |
Routine to assign EKF filter output variables when a UsblFixExtended message is received.
| [in] | x | vehicle north displacement (m). |
| [in] | y | vehicle east displacement (m). |
Reimplemented in Navigation::AUV::Navigation::Task.
Referenced by consume(), and updateDepth().
|
protectedvirtual |
Routine to setup navigation.
Reimplemented in Navigation::AUV::Navigation::Task, and Navigation::General::ROV::Task.
References DUNE::IMC::GpsFix::height, DUNE::IMC::EstimatedState::height, DUNE::IMC::GpsFix::lat, DUNE::IMC::EstimatedState::lat, DUNE::IMC::GpsFix::lon, DUNE::IMC::EstimatedState::lon, m_estate, m_kal, m_ranging, reset(), DUNE::Navigation::KalmanFilter::resetState(), DUNE::Tasks::Task::spew(), and DUNE::Navigation::Ranging::updateOrigin().
Referenced by consume(), and updateDepth().
|
inlineprotected |
Routine to clear accelerations buffer.
| [in] | filter | filter value. |
References getAcceleration().
Referenced by updateBuffers().
|
inlineprotected |
Routine to clear angular velocities buffer.
| [in] | filter | filter value. |
References getAngularVelocity().
Referenced by isActive(), and updateBuffers().
|
protected |
Routine to update sensor buffers.
| [in] | filter | sensor filters gain. |
References updateAcceleration(), updateAngularVelocities(), updateDepth(), updateEuler(), and updateEulerDelta().
Referenced by Navigation::General::ROV::Task::task(), and updateDepth().
|
inlineprotected |
Routine to clear depth buffer.
| [in] | filter | filter value. |
References checkDeclination(), checkUncertainty(), getDepth(), getNumberOutputs(), getSpeedOutputStates(), isActive(), onConsumeLblConfig(), onDispatchNavigation(), reportToBus(), reset(), resetAcceleration(), resetAngularVelocity(), resetDepth(), resetEulerAngles(), resetEulerAnglesDelta(), runKalmanDVL(), runKalmanGPS(), runKalmanLBL(), runKalmanUSBL(), setup(), updateBuffers(), and updateKalmanGpsParameters().
Referenced by isActive(), and updateBuffers().
|
inlineprotected |
Routine to clear euler angles buffer.
| [in] | filter | filter value. |
References getEuler().
Referenced by isActive(), and updateBuffers().
|
inlineprotected |
Routine to clear euler angles delta buffer.
| [in] | filter | filter value. |
References getEulerDelta().
Referenced by updateBuffers().
|
protectedvirtual |
Routine to update navigation filter parameters when a GpsFix message is received.
| [in] | hacc | GPS Sensor horizontal accuracy index. |
Reimplemented in Navigation::AUV::Navigation::Task.
Referenced by consume(), and updateDepth().
|
protected |
Vehicle is aligned.
Referenced by BasicNavigation(), and checkUncertainty().
|
protected |
Dead reckoning mode.
Referenced by BasicNavigation(), checkUncertainty(), and getHeadingRate().
|
protected |
Derivative for heave.
Referenced by onDispatchNavigation().
|
protected |
DVL measurement rejection.
Referenced by consume().
|
protected |
DVL data sanity timeout.
Referenced by consume(), getAltitude(), and onUpdateParameters().
|
protected |
Estimated state message.
Referenced by consume(), isActive(), Navigation::General::ROV::Task::logData(), onDispatchNavigation(), reportToBus(), and setup().
|
protected |
GPS fix rejection.
Referenced by consume().
|
protected |
Valid GPS speed over ground.
Referenced by consume(), reset(), and Navigation::General::ROV::Task::task().
|
protected |
Current velocity relative to ground message.
Referenced by consume(), and runKalmanDVL().
|
protected |
Heading value (rad).
Referenced by isActive(), onDispatchNavigation(), and reset().
|
protected |
IMU entity id.
Referenced by consume().
|
protected |
Kalman Filter matrices.
Referenced by checkUncertainty(), consume(), Navigation::General::ROV::Task::logData(), Navigation::General::ROV::Task::onConsumeLblConfig(), onDispatchNavigation(), Navigation::General::ROV::Task::onUpdateParameters(), Navigation::General::ROV::Task::resetKalman(), runKalmanDVL(), Navigation::General::ROV::Task::runKalmanGPS(), runKalmanLBL(), Navigation::General::ROV::Task::setup(), setup(), Navigation::General::ROV::Task::Task(), and Navigation::General::ROV::Task::task().
|
protected |
Vertical displacement in the NED frame to the origin height above ellipsoid.
Referenced by consume(), onDispatchNavigation(), and reset().
|
protected |
LBL range acceptance.
Referenced by consume(), and runKalmanLBL().
|
protected |
Received LBL fix.
Referenced by BasicNavigation(), and runKalmanLBL().
|
protected |
LBL threshold.
Referenced by BasicNavigation(), and runKalmanLBL().
|
protected |
Kalman Filter measurement noise covariance matrix parameters.
Referenced by Navigation::General::ROV::Task::onUpdateParameters(), and Navigation::General::ROV::Task::Task().
|
protected |
Navigation Data log.
Referenced by Navigation::General::ROV::Task::logData(), onDispatchNavigation(), reportToBus(), and runKalmanLBL().
|
protected |
Kalman Filter process noise covariance matrix parameters.
Referenced by Navigation::General::ROV::Task::onUpdateParameters(), and Navigation::General::ROV::Task::Task().
|
protected |
Ranging data.
Referenced by consume(), Navigation::General::ROV::Task::onConsumeLblConfig(), Navigation::General::ROV::Task::onUpdateParameters(), and setup().
|
protected |
Propeller speed (RPM)
Referenced by BasicNavigation(), and consume().
|
protected |
Kalman Filter state covariance matrix parameters.
Referenced by Navigation::General::ROV::Task::setup(), and Navigation::General::ROV::Task::Task().
|
protected |
Stream Estimator.
Referenced by consume().
|
protected |
Time without altitude readings deadline.
Referenced by consume(), getAltitude(), and onUpdateParameters().
|
protected |
Time without depth readings.
Referenced by checkUncertainty(), consume(), and onUpdateParameters().
|
protected |
Time without DVL sensor readings deadline.
Referenced by consume(), onUpdateParameters(), and Navigation::General::ROV::Task::task().
|
protected |
Time without euler angles readings.
Referenced by checkUncertainty(), consume(), and onUpdateParameters().
|
protected |
Time without GPS sensor readings deadline.
Referenced by consume(), onUpdateParameters(), and Navigation::General::ROV::Task::task().
|
protected |
Time without main depth provider.
Referenced by consume(), and onUpdateParameters().
|
protected |
Navigation Uncertainty log.
Referenced by Navigation::General::ROV::Task::logData(), onDispatchNavigation(), and reportToBus().
|
protected |
Received valid ground velocity message.
Referenced by consume(), reset(), runKalmanDVL(), and Navigation::General::ROV::Task::task().
|
protected |
Received valid water velocity message.
Referenced by consume(), reset(), runKalmanDVL(), and Navigation::General::ROV::Task::task().
|
protected |
Current velocity relative to the water message.
Referenced by consume(), and runKalmanDVL().
 1.8.11
1.8.11