
OceanTech - Operational Management System based on Intelligent Robotic Vehicles for the Global Ocean Exploration
The OceanTech R&D project aims at designing and constructing new products and services for the deep sea, to be made available in the global market.
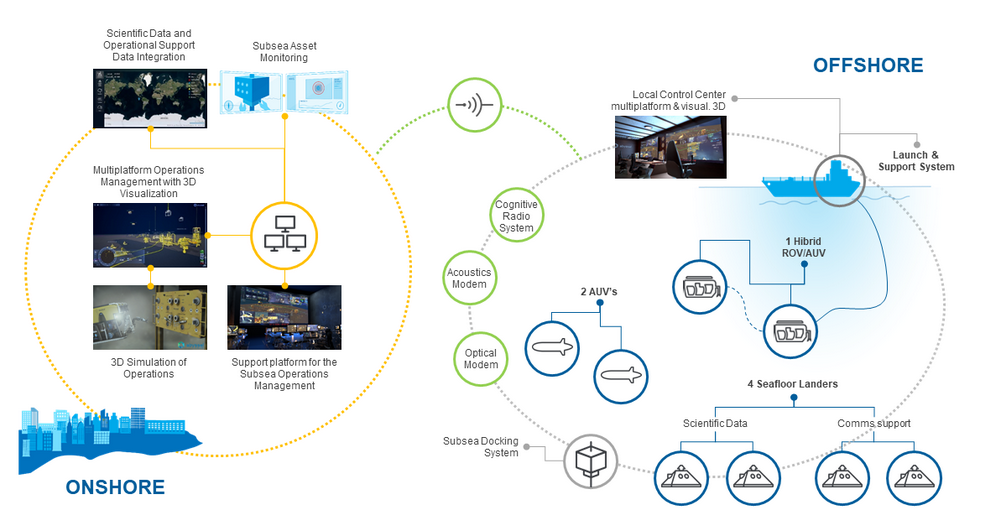
The project outcome can be summarized in 6 Products, Processes and Systems:
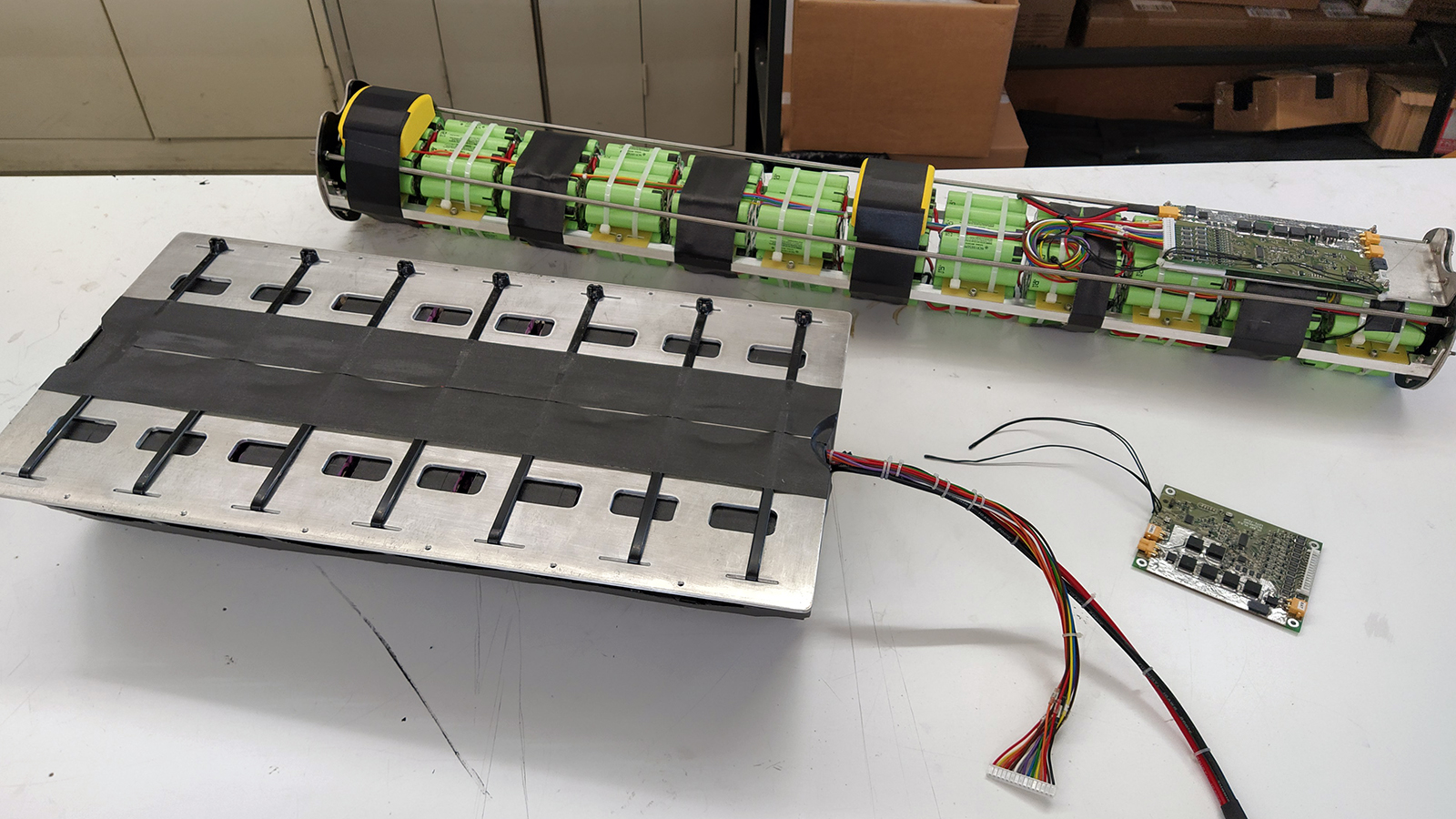
- AUV Torpedo - This new generation of AUV torpedo-type vehicles will have a longer battery life (up to 40 hours) to be able to respond to the challenges of subsea exploration in wider distances as well as being capable of operating at greater depths (1500 meters).
- Seafloor Lander - This new generation of low-cost data-acquisition fixed platforms will have the capability to be used to up to 3000 metres depth, being developed by making use of new production processes, new materials and optimizing its structure, communication systems and payload management.
- Hybrid ROV/AUV - A vehicle capable of mission transition between the remote and autonomous modes of operation, allowing it to autonomously perform various types of missions.
- Operations Support Infrastructure - An Immersive Control Center using augmented reality technologies with the aim of providing the user better navigation, visibility, and spatial perception of the entire underwater environment. A new in-depth vehicle docking system will also be developed to allow autonomous platforms to increase their mission time in depth.
- Network Communication System - Two in-depth communication modems will be developed, one based on acoustic technology (for long-range communications), and another on optical technology (for relatively short distances).
- Management System for Subsea Operations - It will integrate data from various platforms of different natures and presenti it to support the operation in an appropriate and suitable way by aggregating telemetry, previously existing 3D models, real images and sonar data.
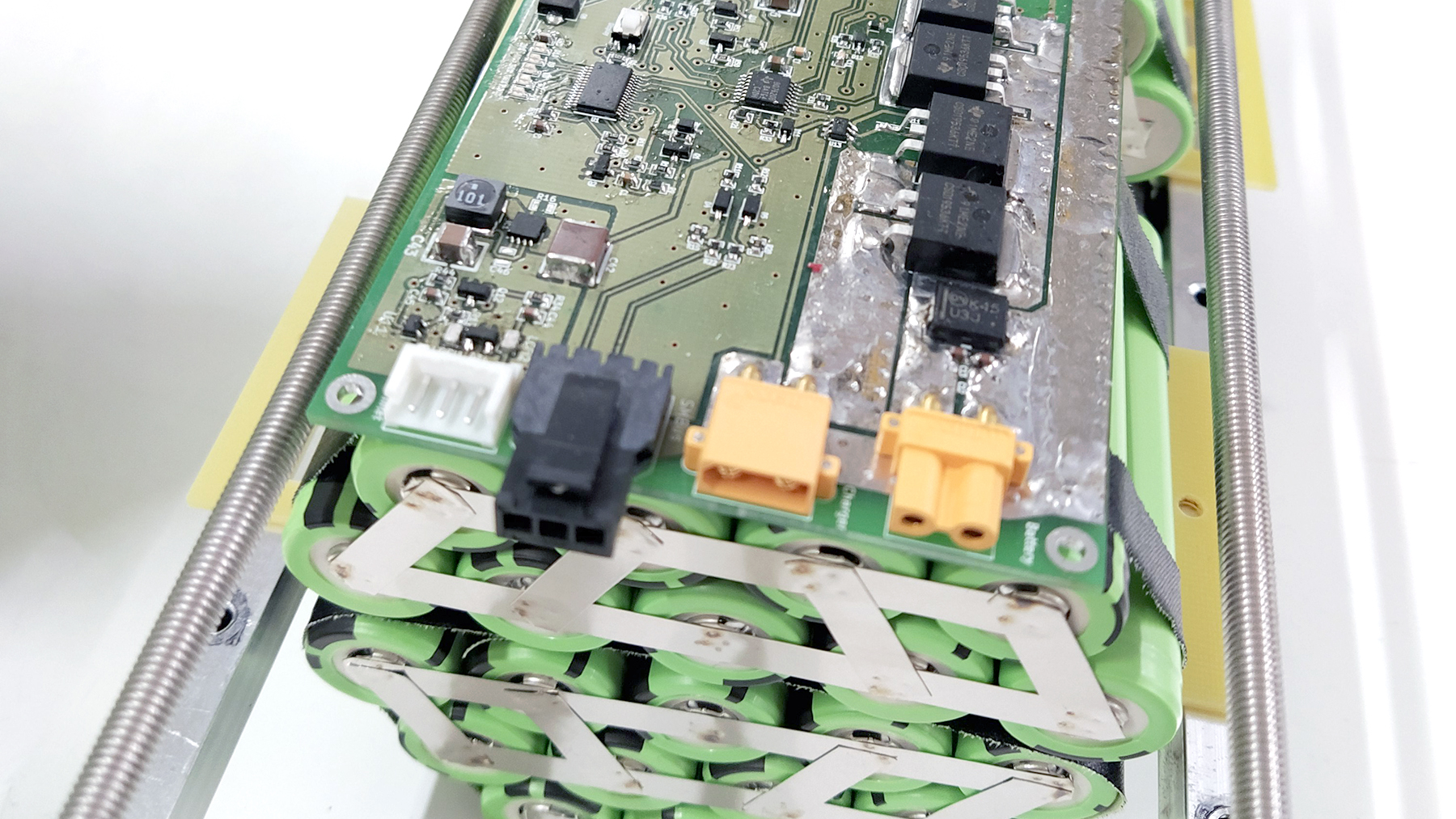
LSTS-FEUP participation focuses in contributing to the construction of the systems AUV Torpedo and Seafloor Lander by developing the Energy sub-system, Communications sub-system and Operating Console. A state-of-the-art research resulted in developing the batteries and related managing in-house making better use of the available funding.
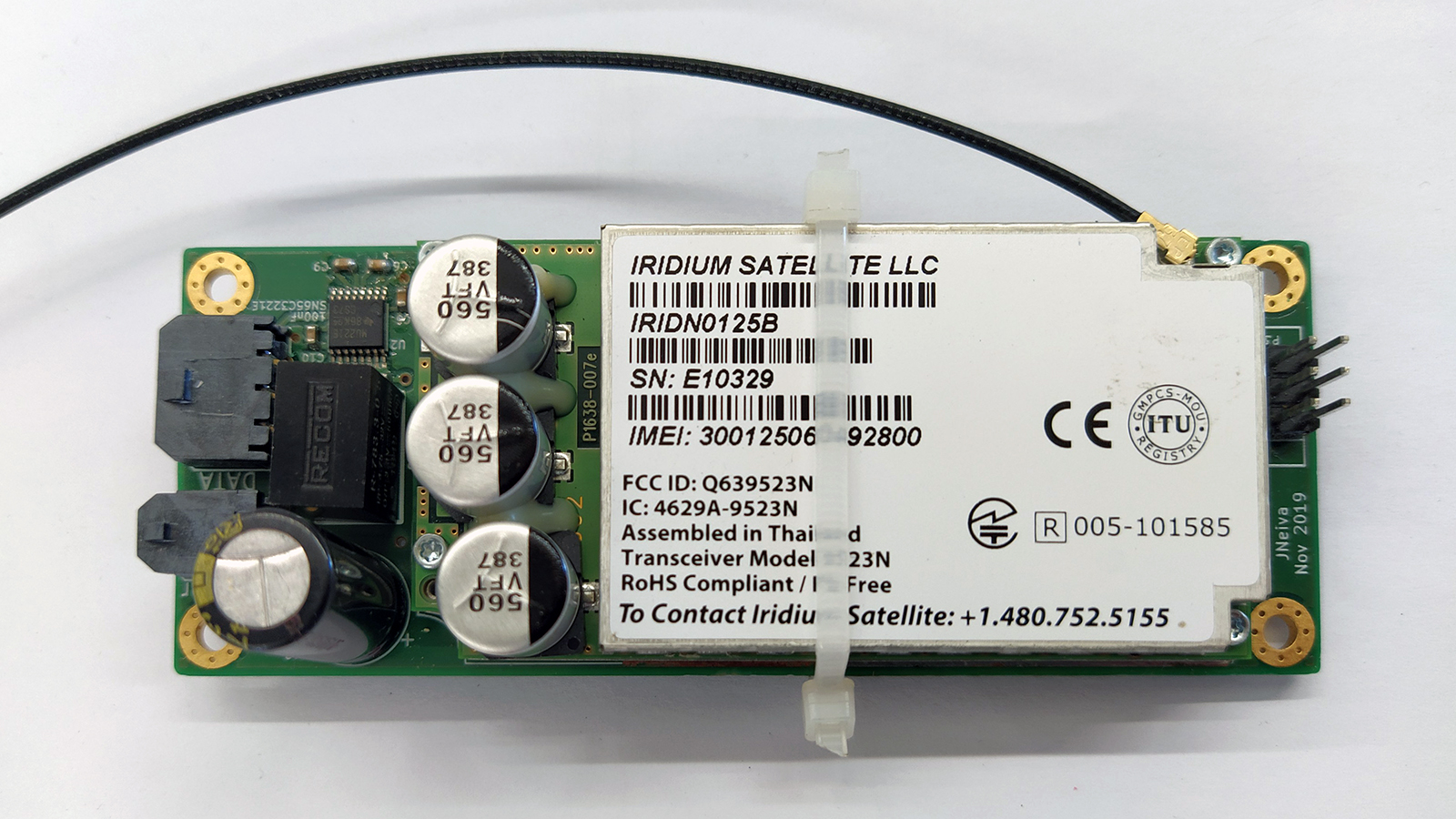
A set of drivers (both hardware and software) is currently under development to engage proper integration of the communication links. While the Lander will rely mainly on acoustic communication, the Torpedo AUV will also be capable of communicating via wireless 2.4GHz and satellite.
The Operation Console will be developed using Neptus Command and Control Software as a framework taking advantage of the numerous years of experience of the LSTS team in developing and maintaining unmanned systems software.
The project started in December 2017 and was expected to end in December 2020. Due to several delays related to the SARS-CoV-2 pandemic crisis, the term of the project was postponed to October 2021.
Promotors:
Abyssal S.A. | IPMA - Portuguese Institute of the Sea and the Atmosphere | OceanScan - Marine Systems & Technology, Lda. | University of Porto | University of the Algarve | Critical Materials S.A. | CEiiA - Engineering and Development Center | TEKEVER Autonomous Systems | TEKEVER - Tecnologias de Informação, S.A. | TEKEVER ASDS | Usimeca - Metalomecânica, Lda. | Higher Technical Institute
This project has received financial support from the European Union - FEDER - 5.731.332,04 EUR